The Conversation (0)
Sign Up
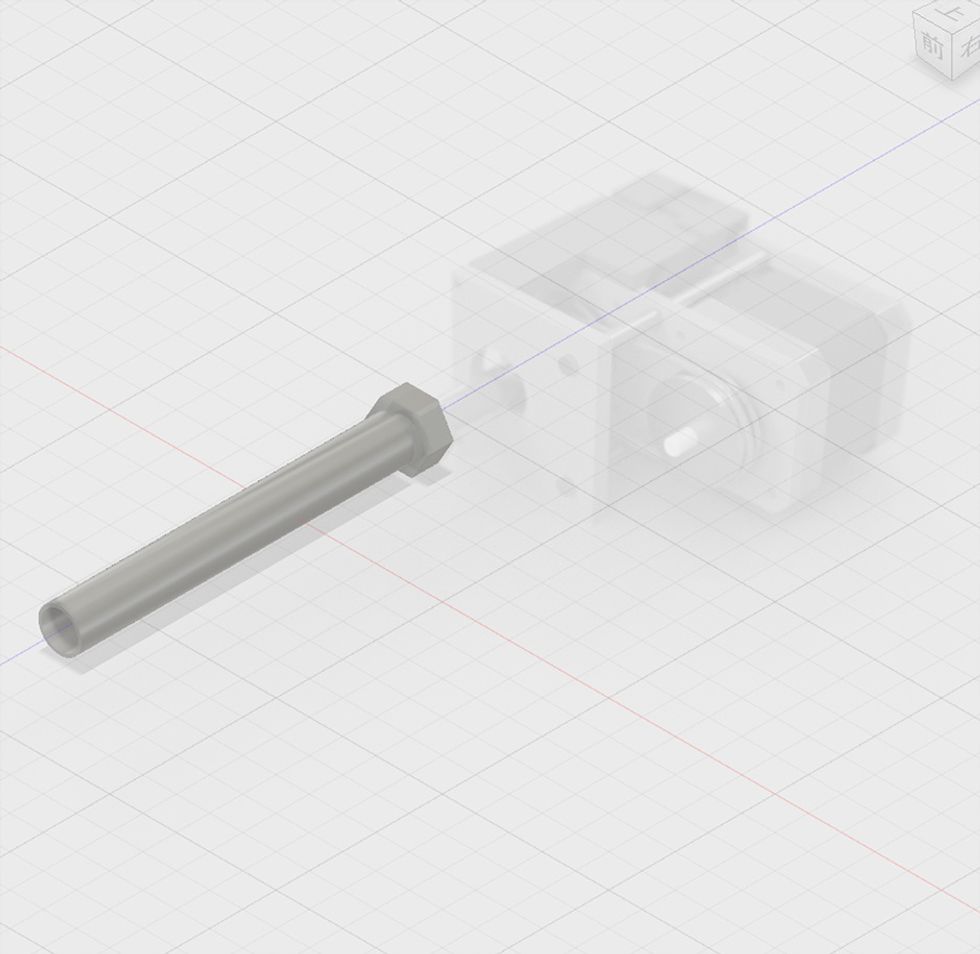
パイプとナットを接着材で固定します。接着材は強力なモノを使ってください。※TechShopやMaker'sBaseといったFAB系の施設に行くと、TIGという溶接機械もあります上級者はそういった施設で溶接を試してみるのもいいかもしれません。
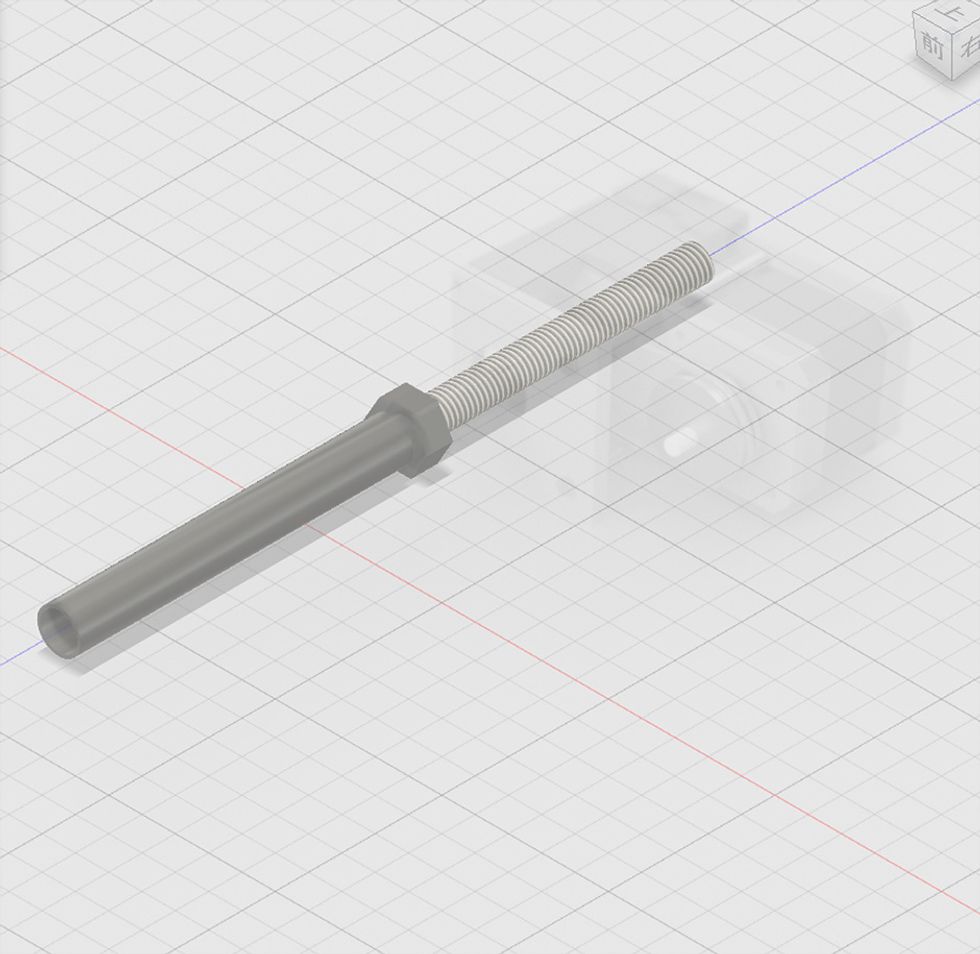
パイプ内に長ネジを入れます。入れる際は、ナットをグルグル回して入れることになりますので、根気よく回してください。
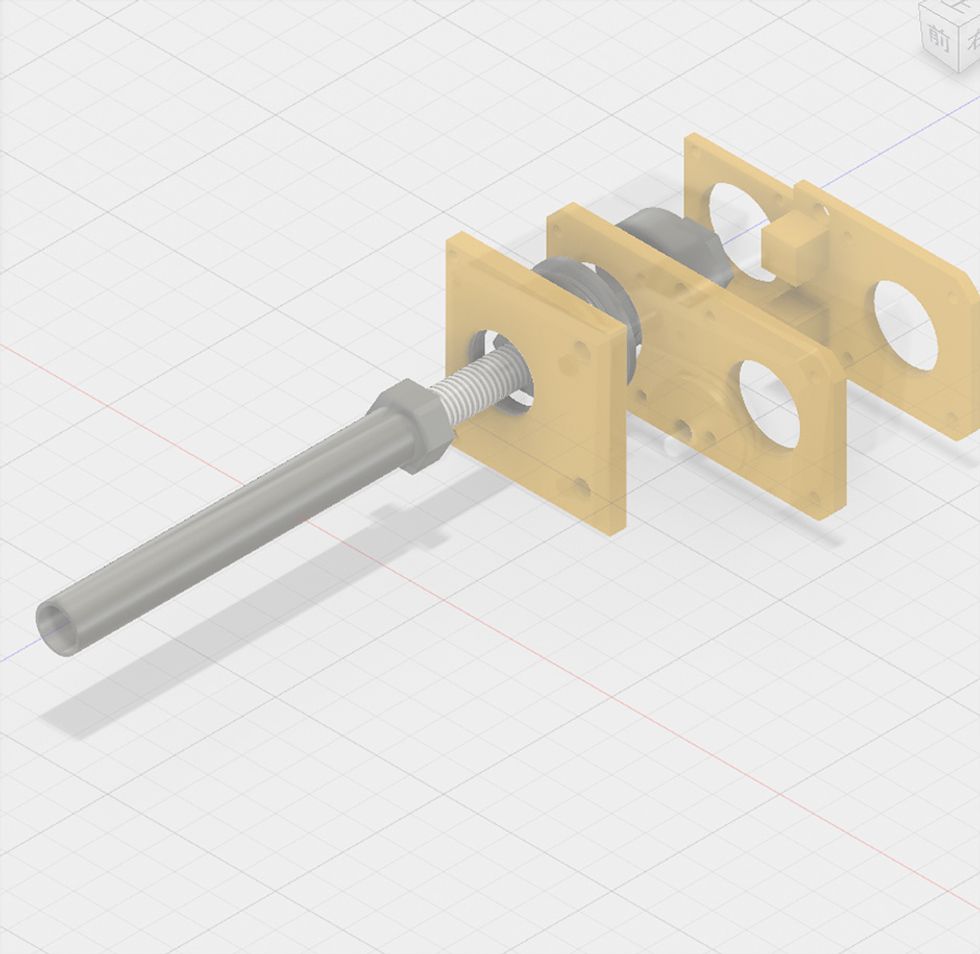
フレームなどを入れます。ここは少し難しいため、補足を加えますが、この工作で最も難易度の高い部分です。
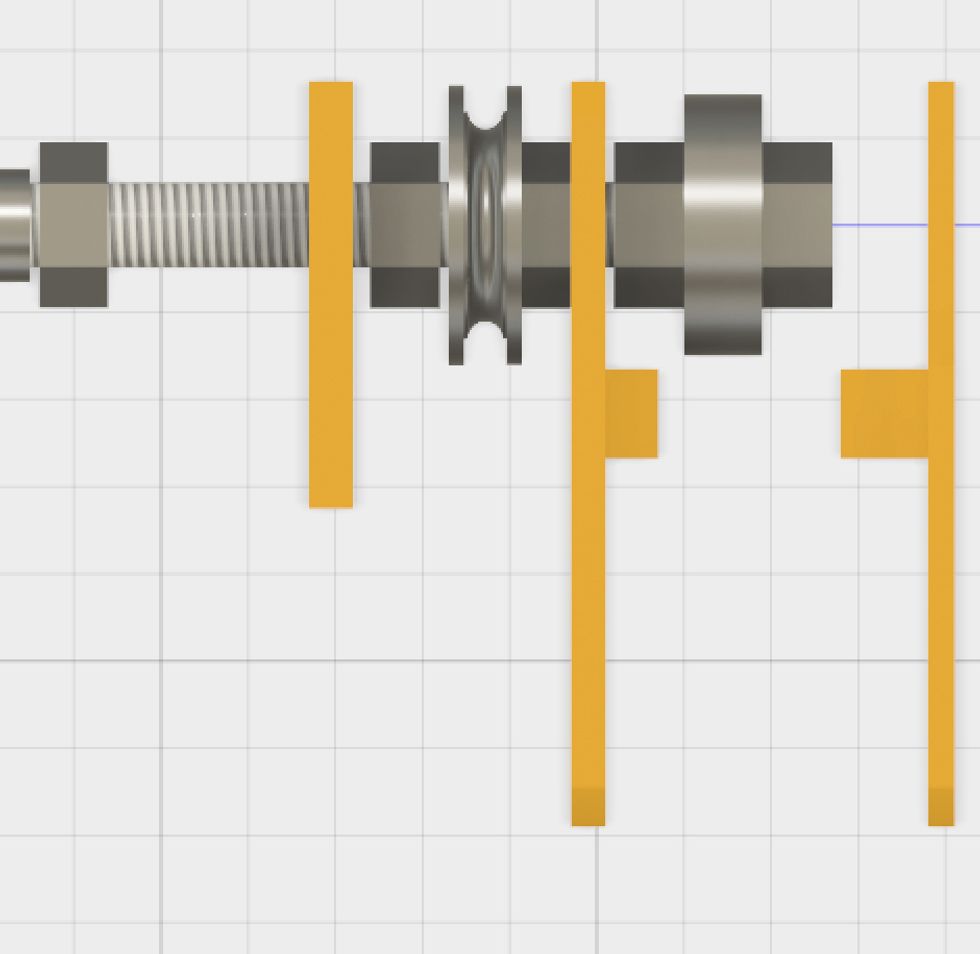
補足です。順番は、フレ・ナット・ナット&プーリー・ナット・フレ・ナット・ベア・ナット・フレの順です。(フレ=フレーム・ベア=ベアリングの略です。)フレームはSTLデータで配信していますので、もしよければDLしてください。ただの板でも大丈夫です。穴あけ用の図面データについてはお問い合わせください。

https://modelabo.itmedia.co.jp/4965/
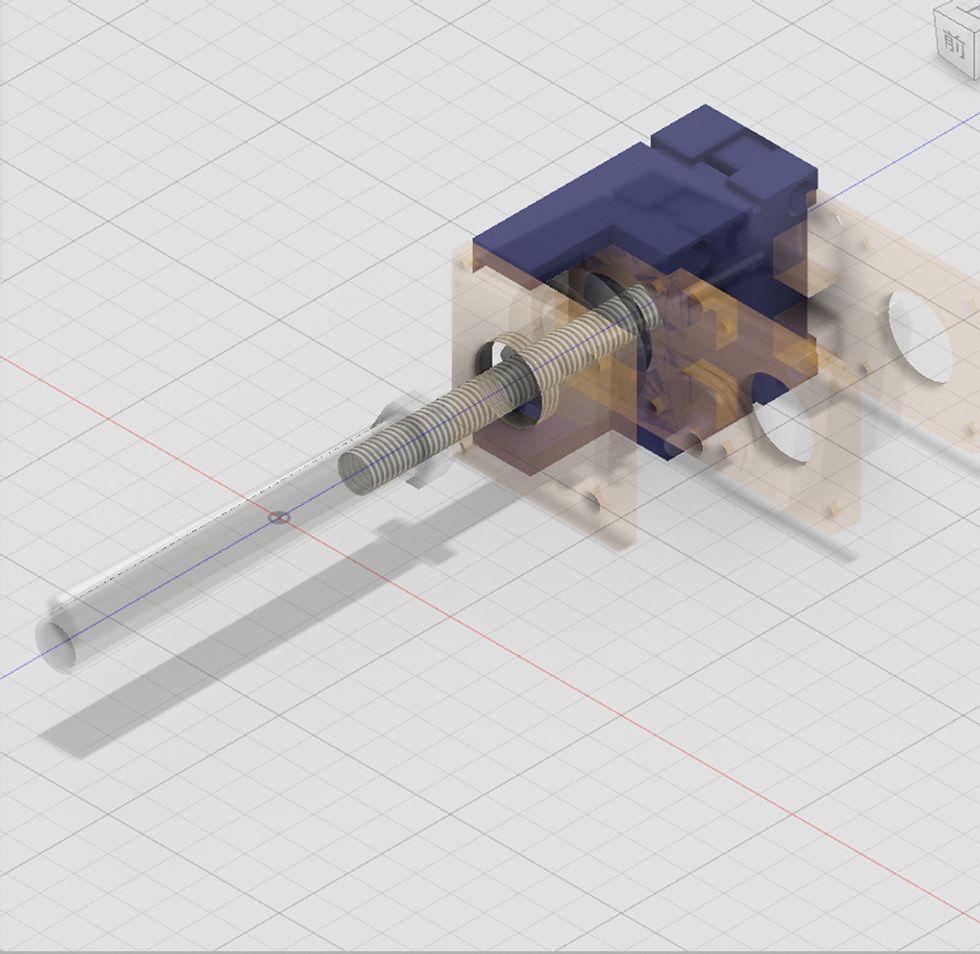
青いボディ部分をはめ込みます。まだ、雰囲気を掴む感じなので、ああ、こうしてはめるんだなというイメージを掴んでいただければオッケーです。
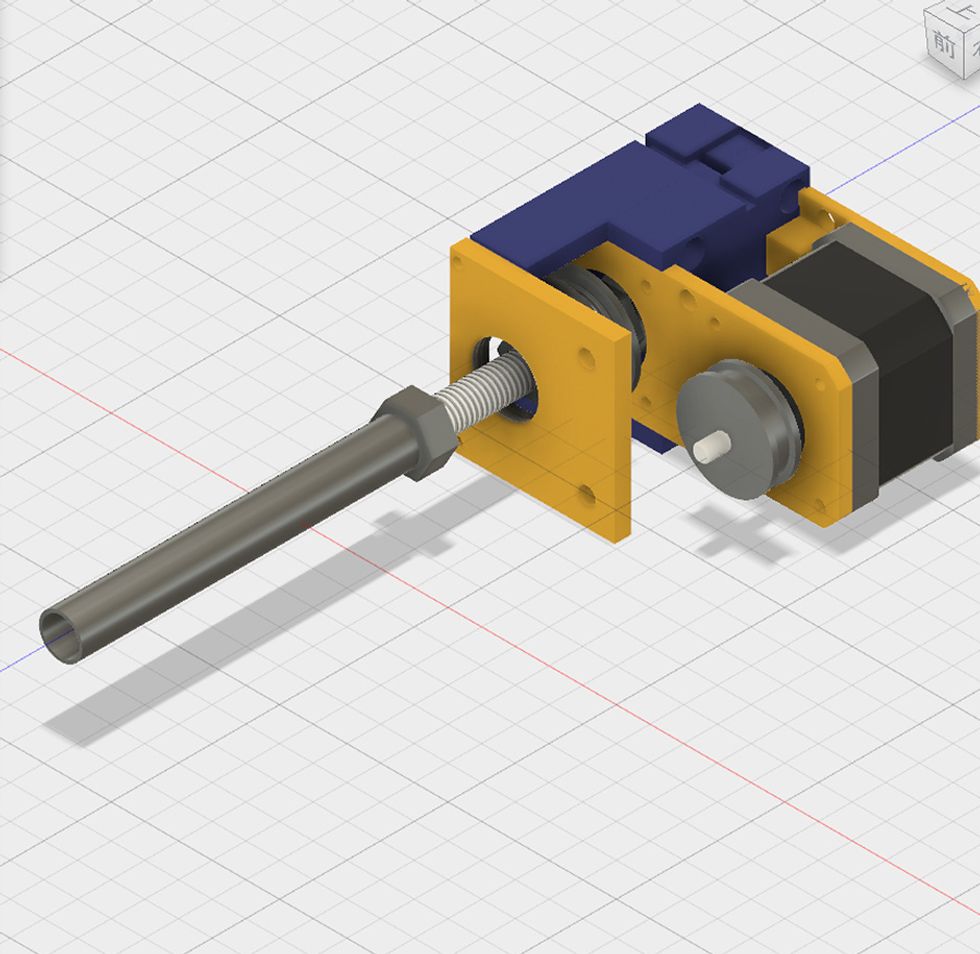
ステッピングモーターを接続します。上手くはまる事を確認してください。まだ仮の組み段階ですが、こちらは前面の四隅にあるネジ穴を止めていただいても大丈夫です。
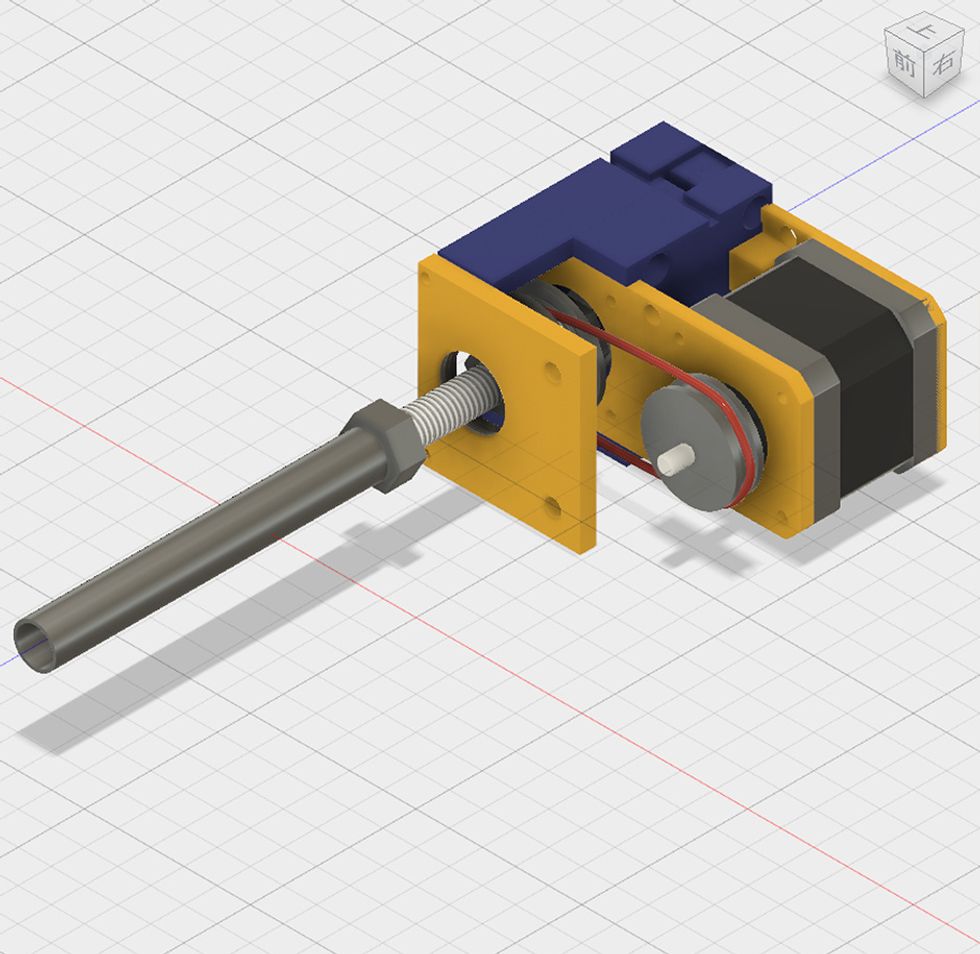
ベルトの接続。ゴムや市販のプーリーベルトなどを使って、二つのローラーがシンクロして回転するように調整を行ってください。ここをバッチリになれば、構造物自体はプラスチックのたわみ等に頼ってしまうこともできます。自動ドアが動くためのまさに命綱です。
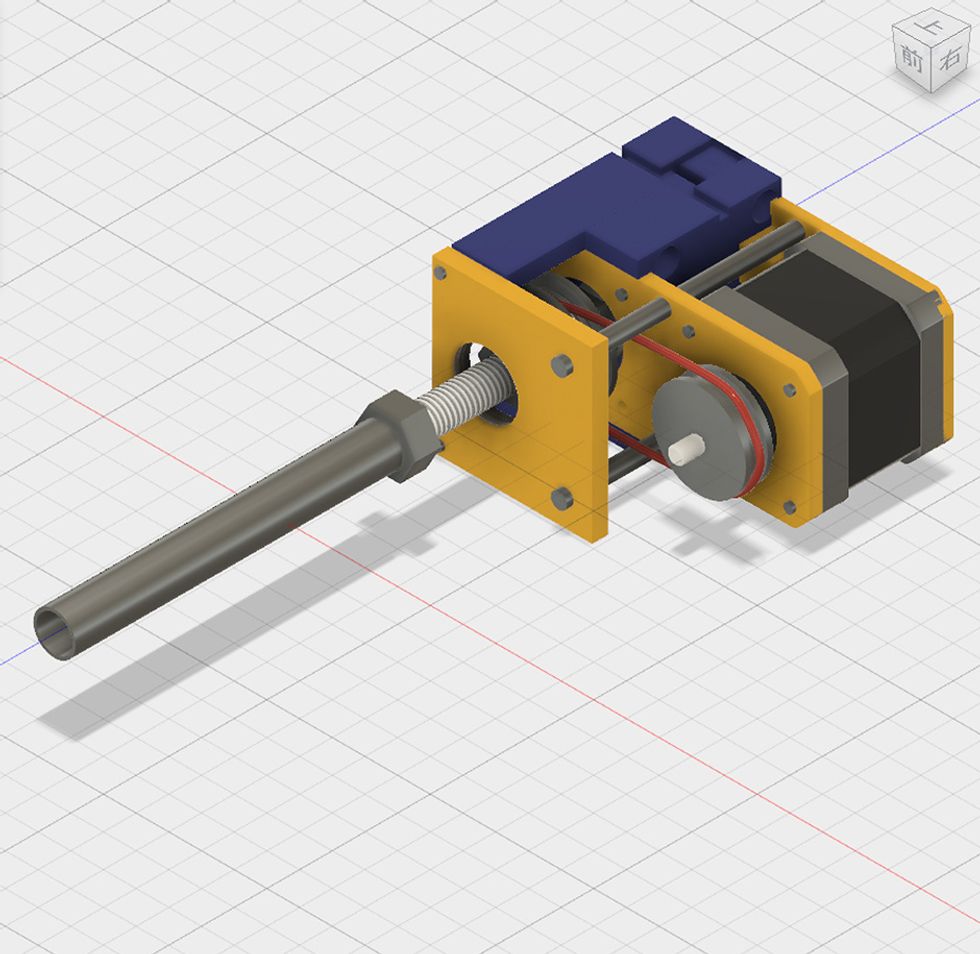
とうとう固定です! 普通のネジや木ネジ、接着材などでそれぞれを固定します。長ネジのベアリングを挟んでいるナット、プーリーを挟んでいるナットについては、外側から固定するようにしてください。ハンバーガーの包み紙の立ち位置としてイメージしてもらえるとわかりやいいと思います。

できました! 遠くから見ると、トーマスとパーシーに見えますが、青いフスマンと緑のフスマンです! (レールに見えるのは、パイプです。)
ステッピングモーターの制御については、下記ページ等をご参考に為さってください。フスマンを使った事例についても追って追記していこうと考えています。http://deviceplus.jp/hobby/entry037/