The Conversation (0)
Sign Up
これはBDK6BETA用のマニュアルです。「ベゼリー:ロボット開発はじめてキット」をお買い求めのお客様は、下記のリンクをご覧ください。http://bezelie.com/blog/?page_id=199
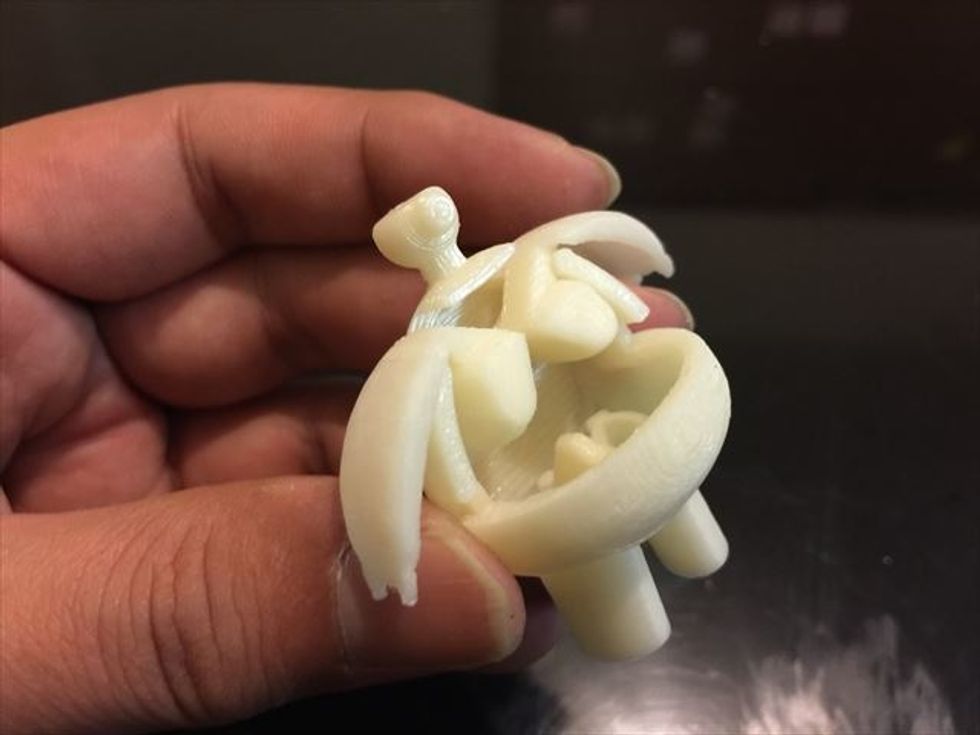
これが完成形です。

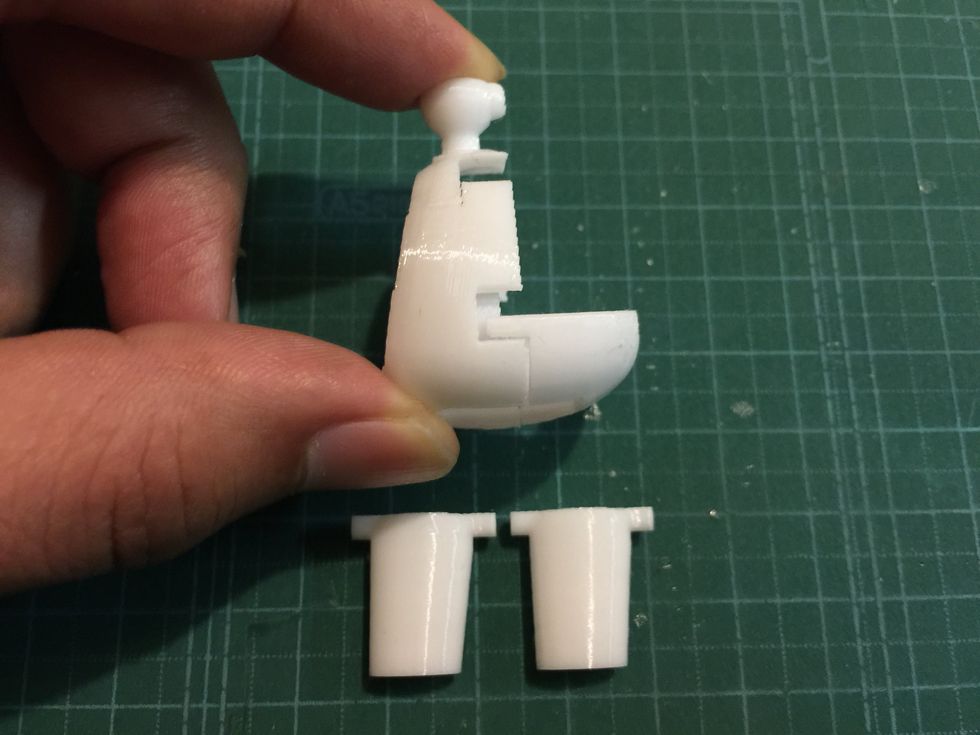
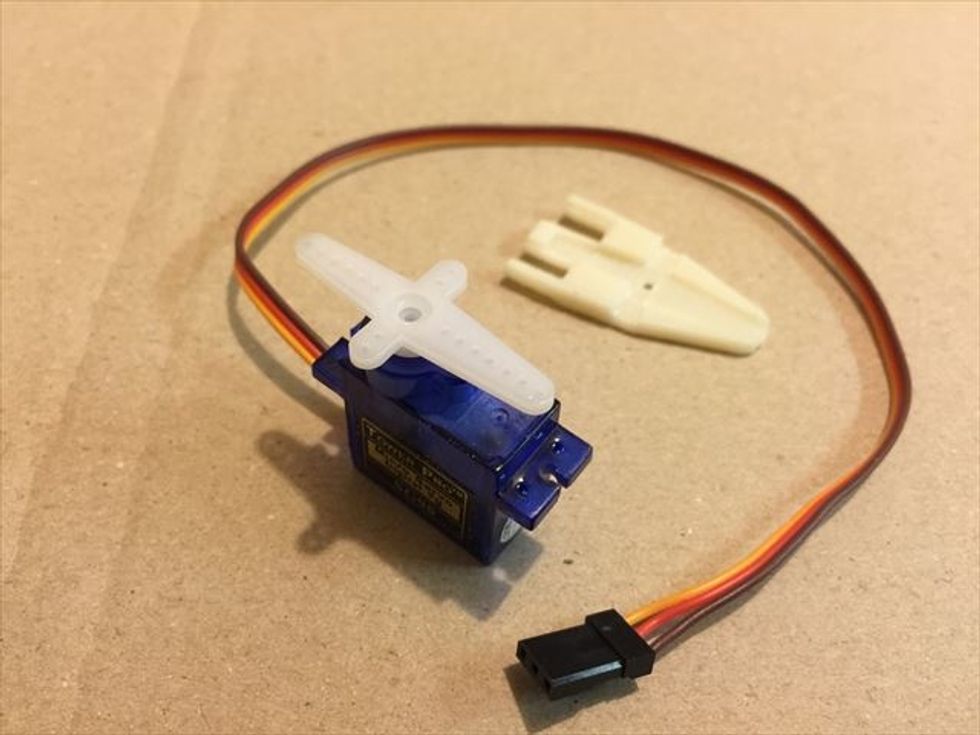
パッケージの中身を取り出します。
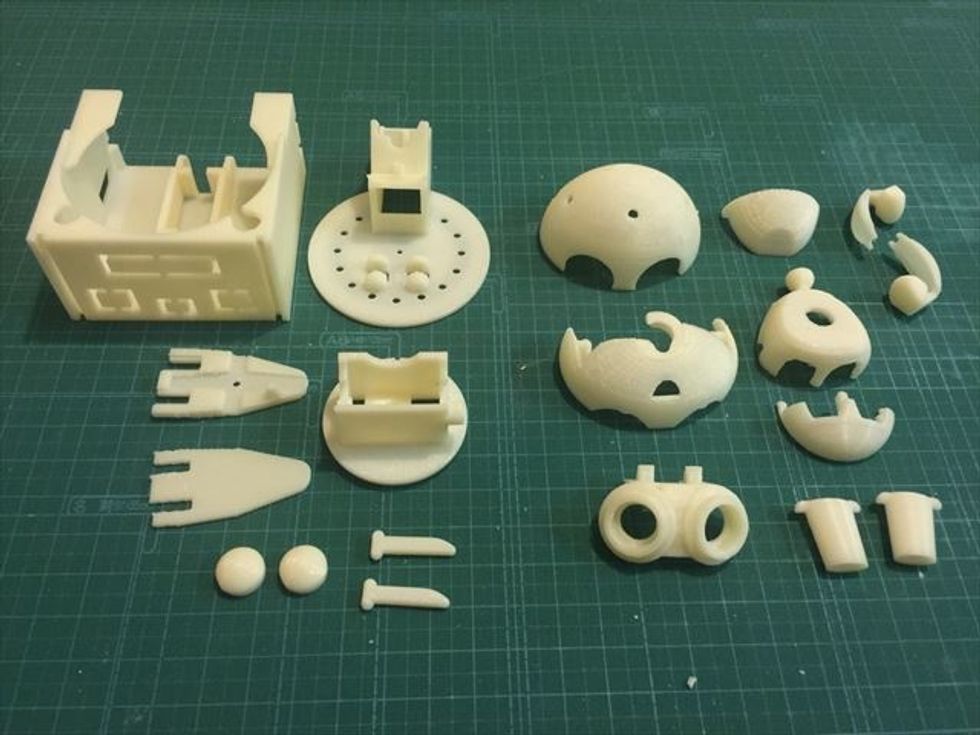
左側が台座やスタンドなどの周辺パーツ。右側がロボットのパーツです。

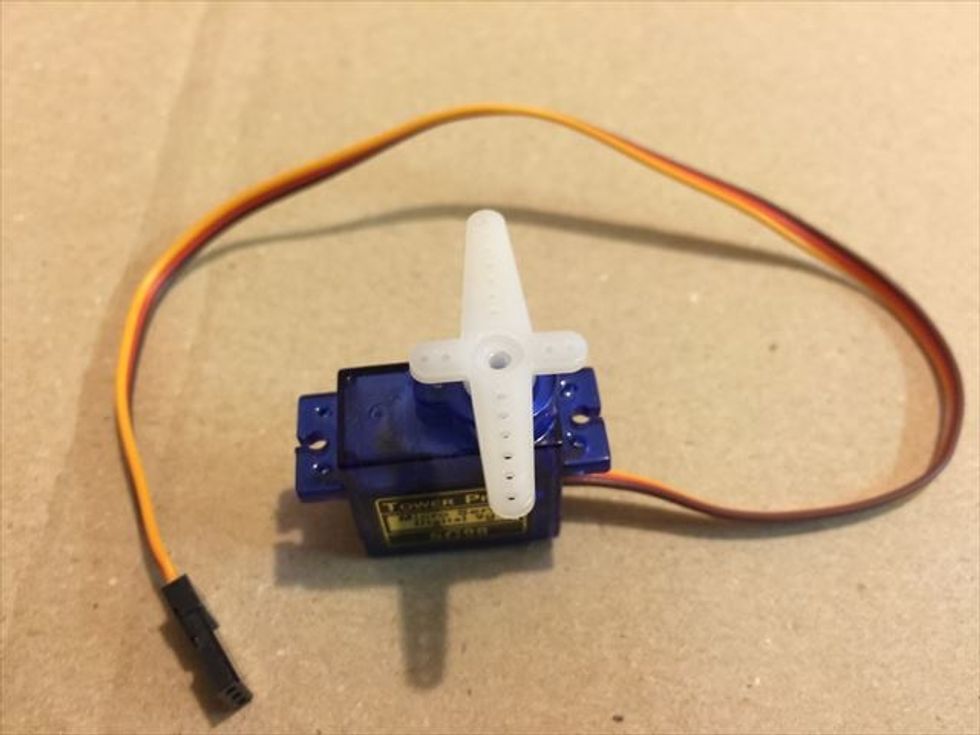
ひとつ目のサーボを取り出します。
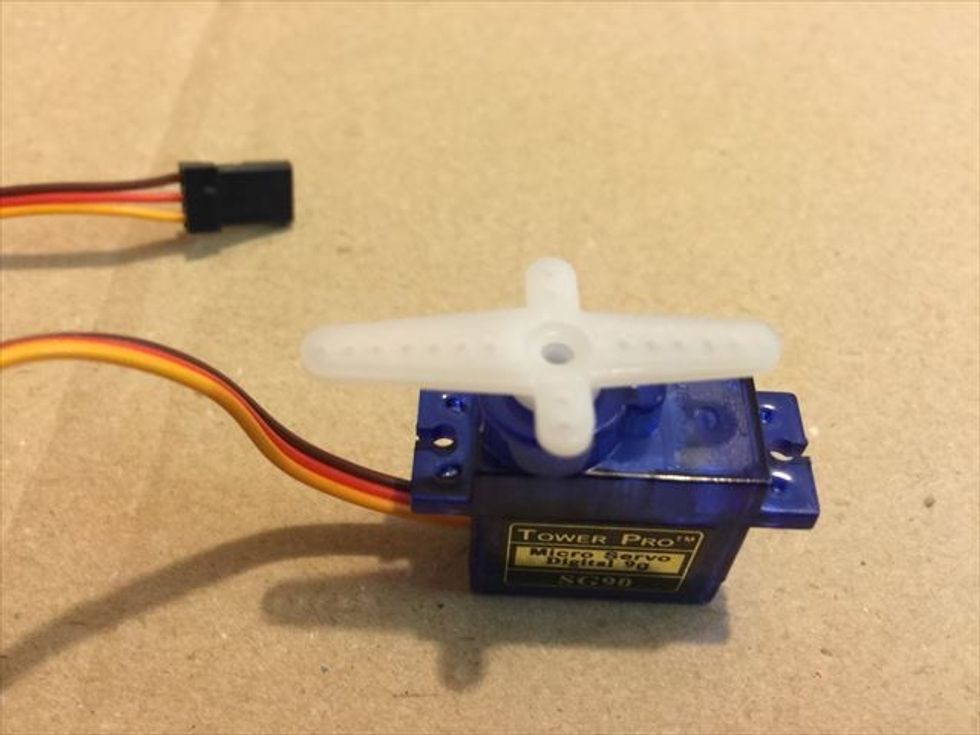
十字型のサーボホーン(白いプラスチックのパーツ)をサーボにハメ込みます。このサーボホーンは左右の長さが微妙に違いますので向きに注意してください。長いほうを左側に向けます。

十字型のサーボホーンは、たまに不良品が混ざっていることがあります。左が正常なもの。中央が不良品です。不良品は中央部分が突出しており、穴もわずかに大きくてサーボにうまくハマりません。運悪く不良品だった場合は、写真右側の直線型サーボホーンを使いましょう。
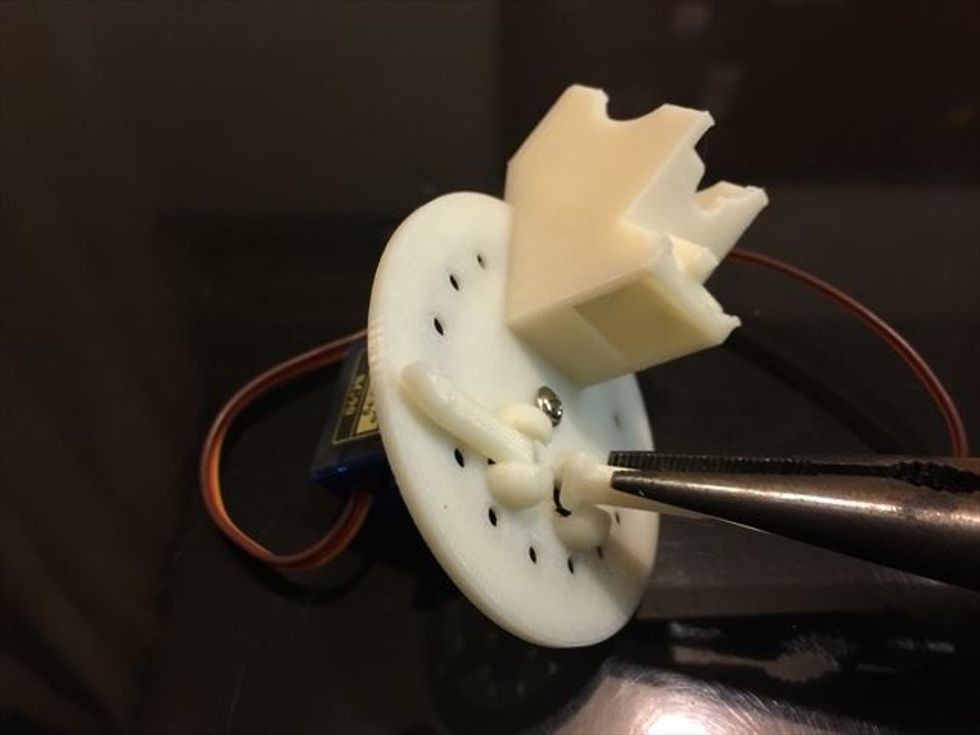
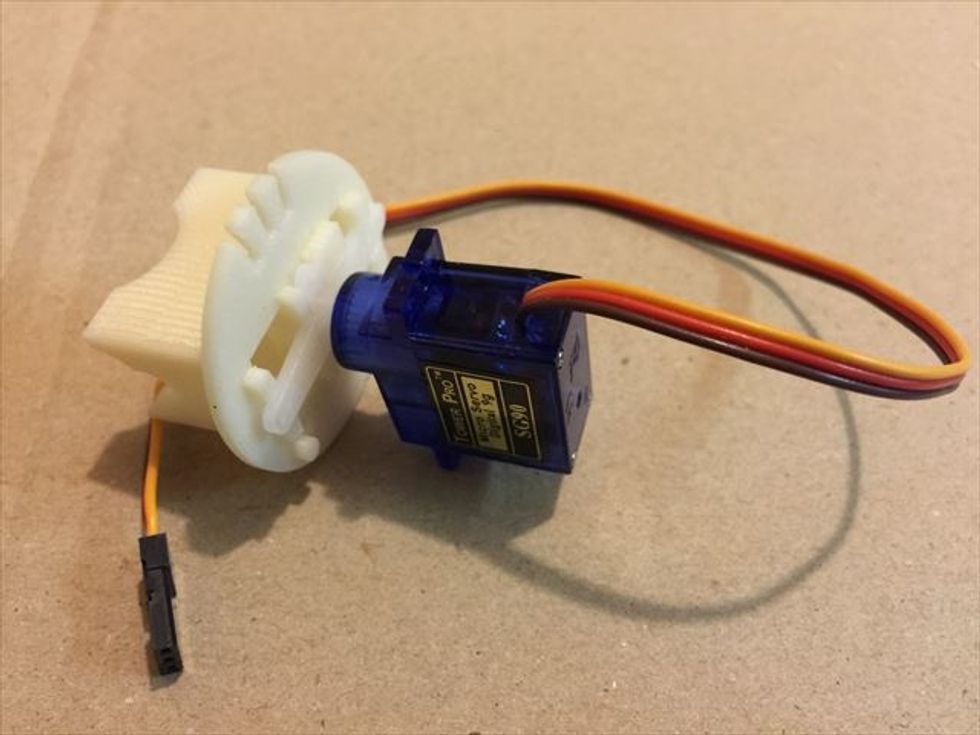
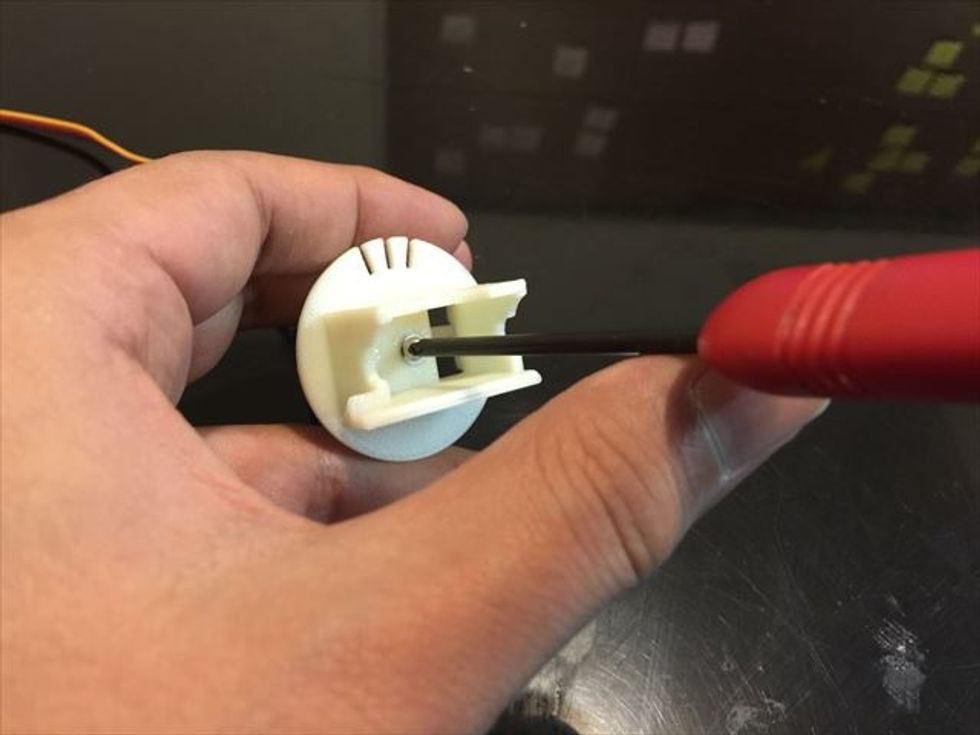
まずサーボホーンを写真のパーツ(回転台)の裏の窪みにハメます。向きがありますが、逆向きだとハマりません。サーボには長いネジ2本、短いネジが1本ついてますが、長いネジを使い魔明日。細いプラスドライバーを使い、サーボホーンを固定します。
足首パーツの軸を回転台の軸受けにハメます。ラジオペンチを使ったほうが楽です。軸受けには軸を通すための窪みがあるのですが、写真だとわかりにくいので次ページの図面をご覧ください。
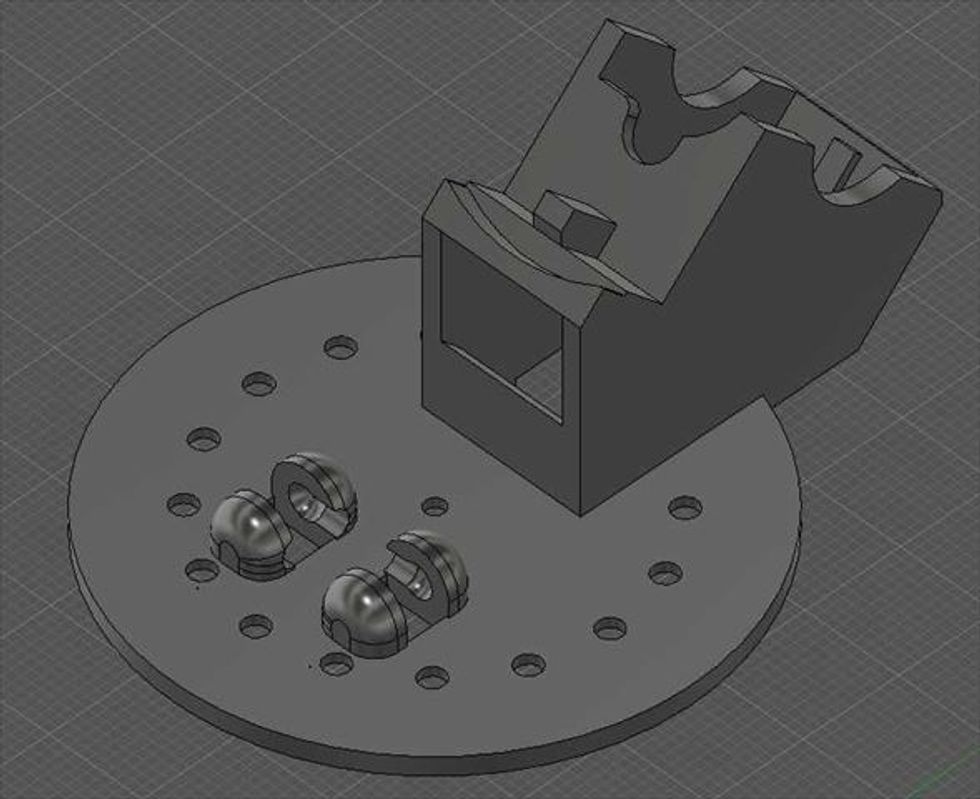
このように足首パーツの軸受けには内側に凹みが刻まれており、ここに軸を通すことでハメ込みます。ラジオペンチで足首パーツをつかみ、ネジるようにやると上手くいきます。
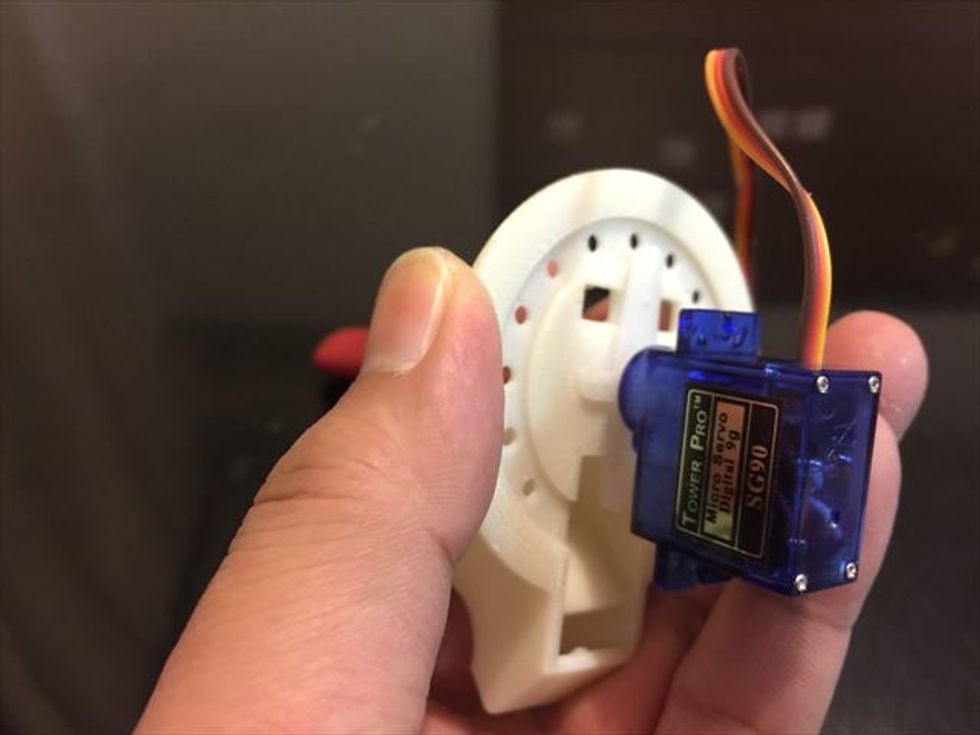
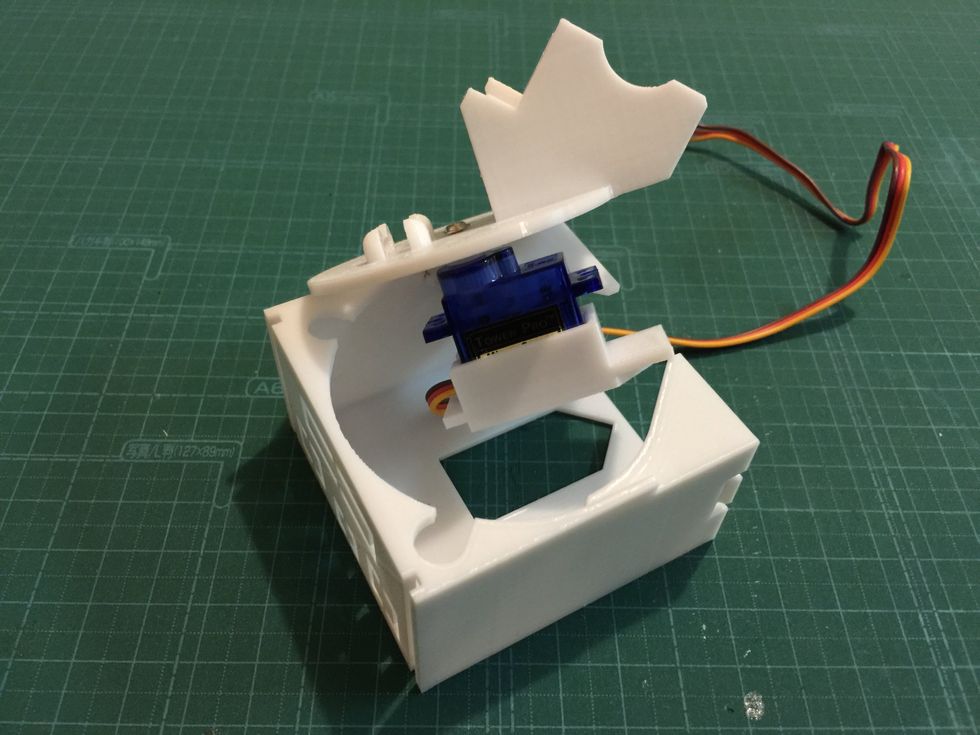
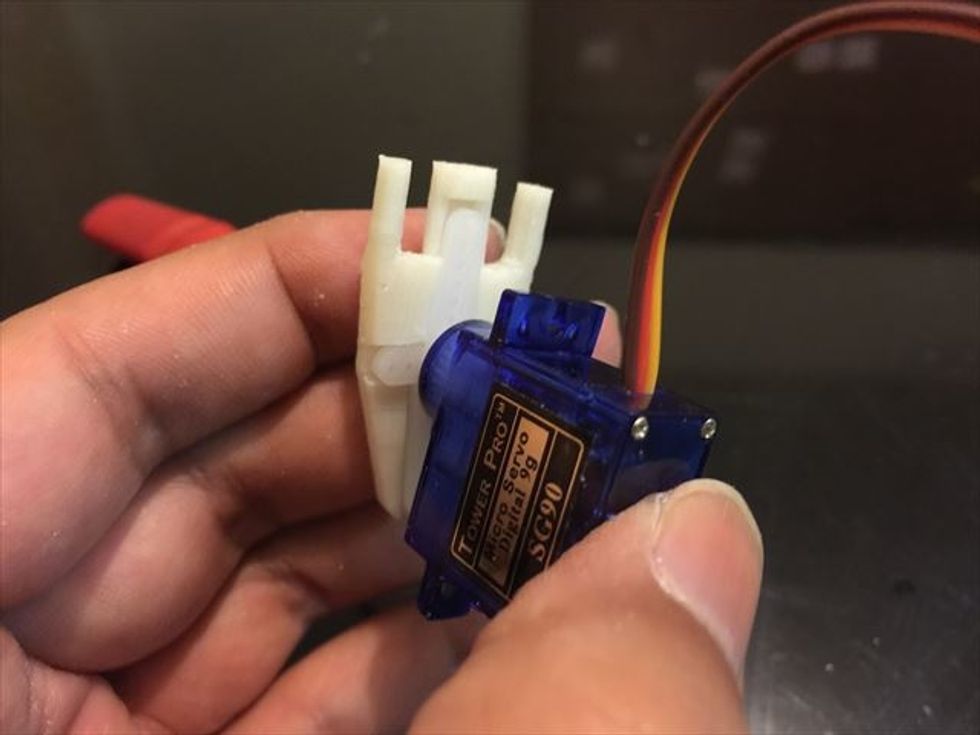
サーボをサーボホルダーに差し込みます。スリットからケーブルが出るようにします。
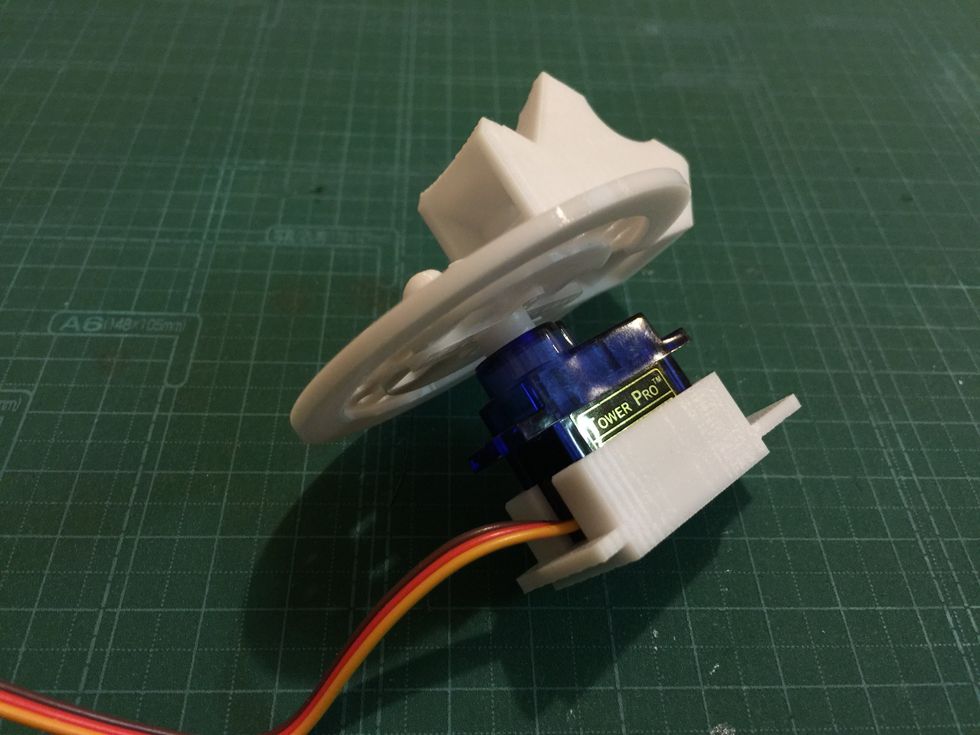
台座の溝に、サーボホルダーをハメ込みます。
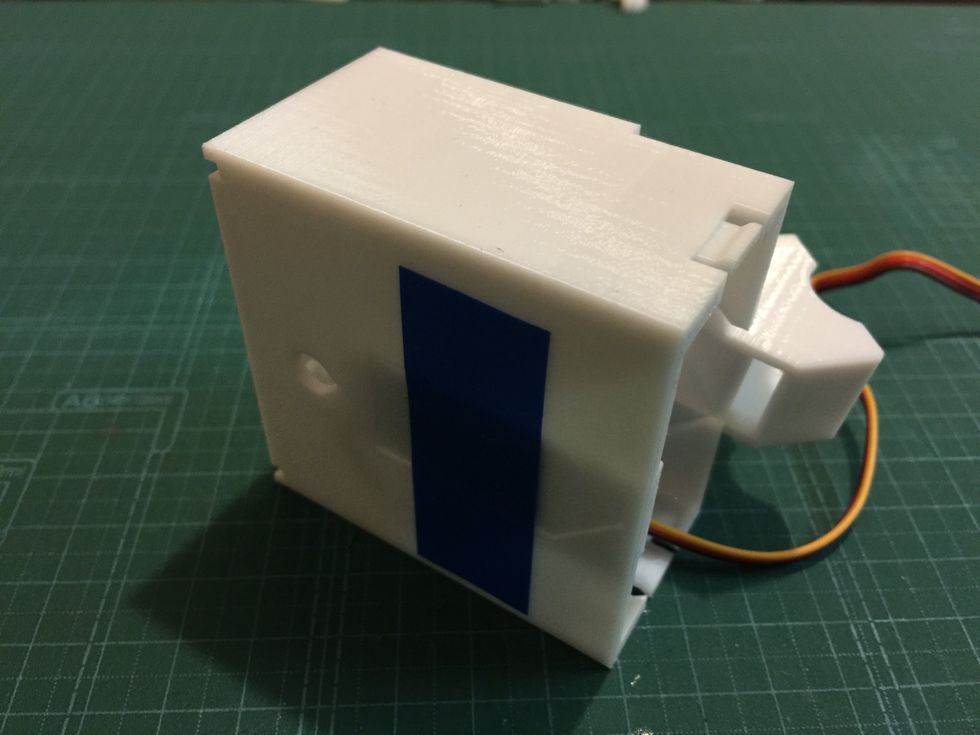
済みませんが、今回のバージョンではサーボホルダーと台座の接続がユルいので、ビニールテープなどで固定したほうがよいかもしれません。
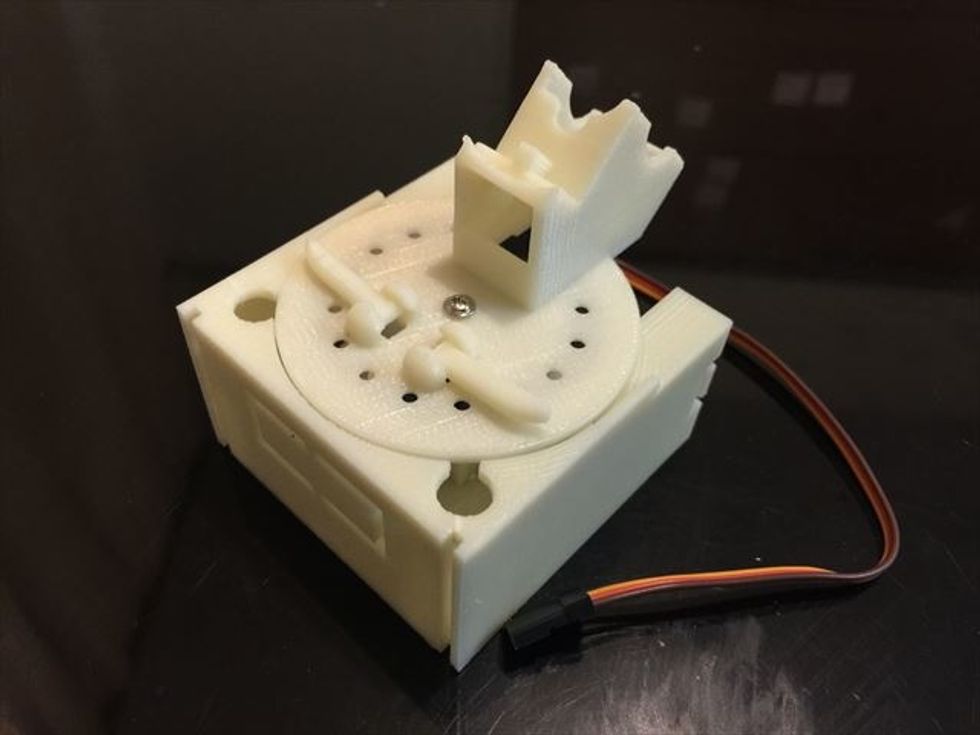
台座と回転台が合体しました。
2つめのサーボを取り出し、十字型サーボホーンを写真の向きに取り付けます。長いほうを奥側に向かせます。
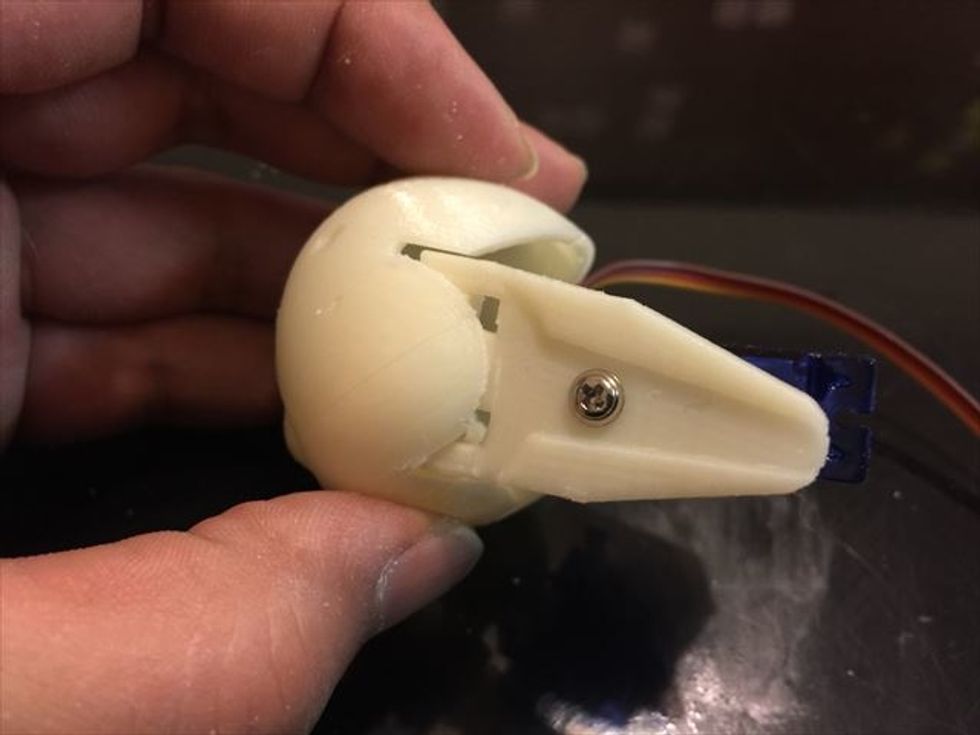
サーボホーンをコネクタパーツの裏にハメます。向きがあり、逆向きにはハマりません。
コネクタパーツとサーボを、長いネジで固定します。
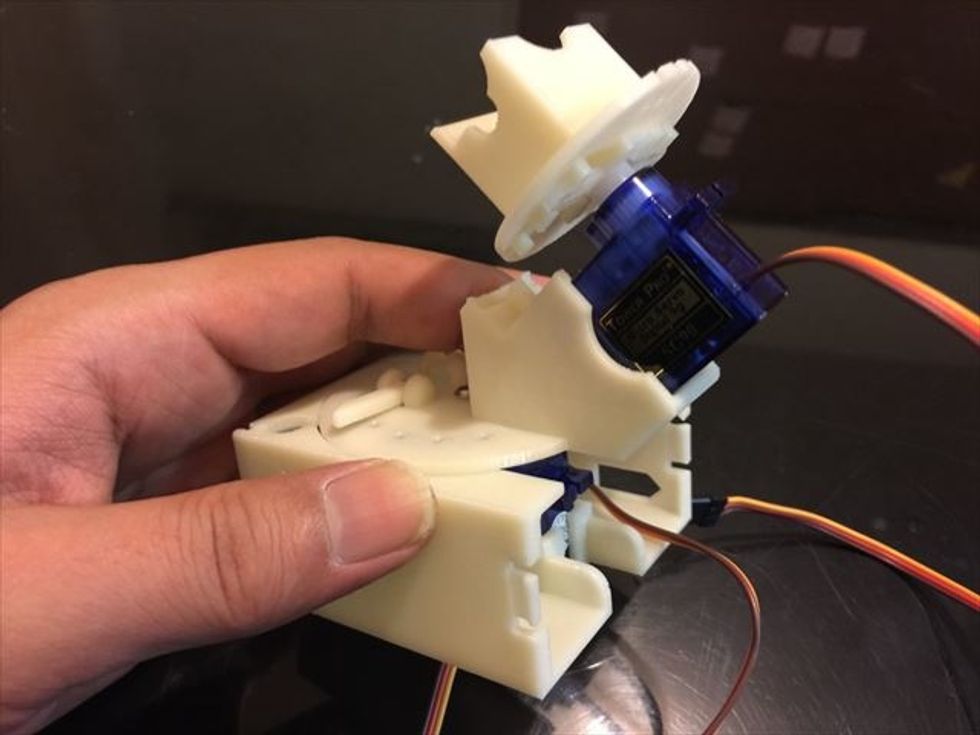
サーボを回転台のサーボホルダーにハメ込みます。差し込む向きにご注意ください。
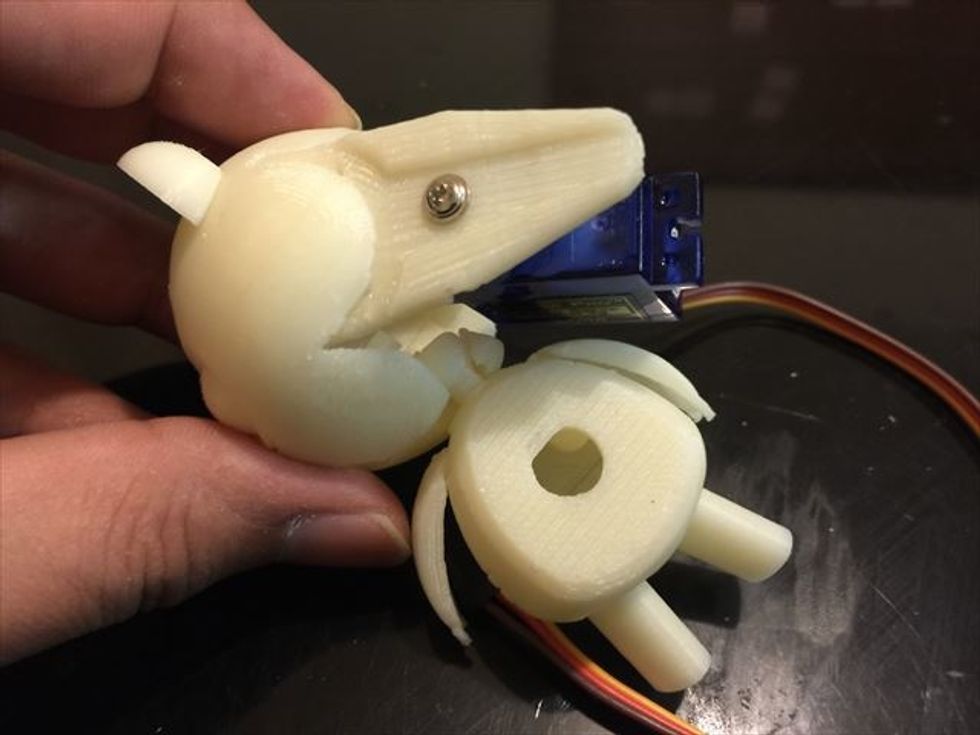
サーボケースが小さくてサーボが入らない場合は、サーボケースの内側にある突起を、鉄ヤスリなどで削って調整してください。
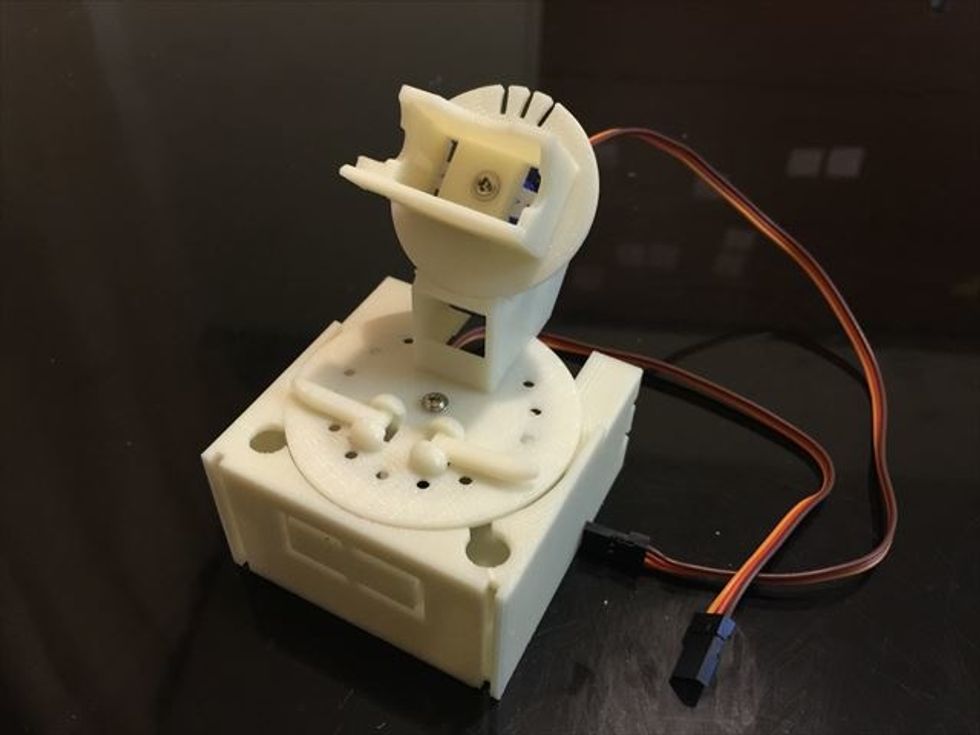
回転台とコネクタパーツが合体しました。

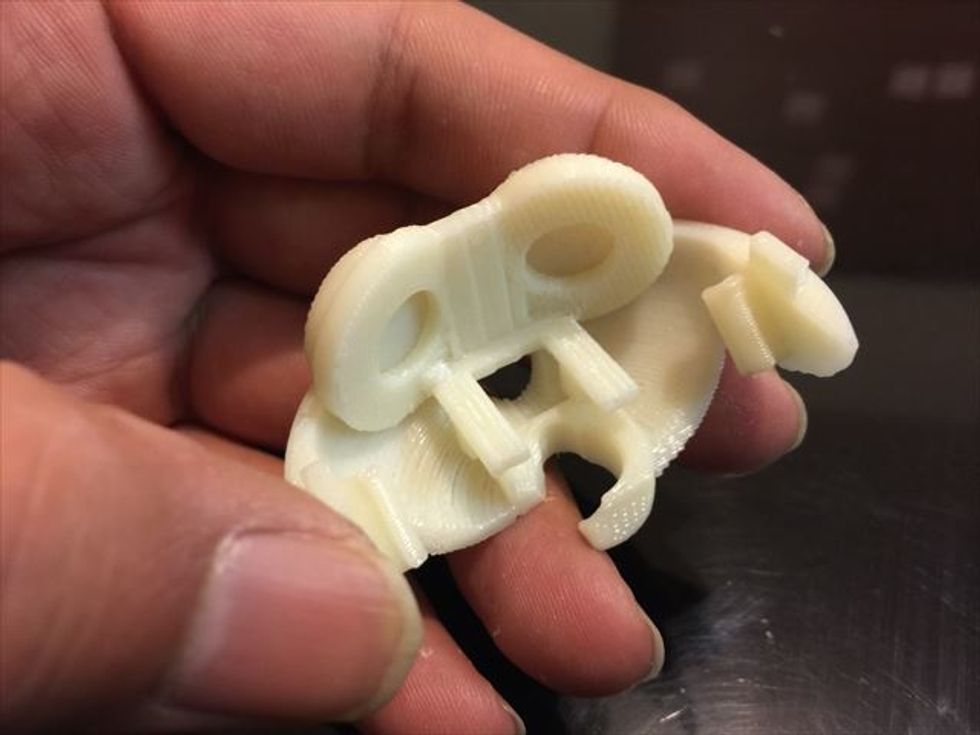
次にロボットのボディを組み立てます。胸、腹、背、手☓2、足☓2を並べます。
まずは背パーツに腹パーツを差し込みます。

2つの足パーツを穴に通します。足パーツは前後があります。傾斜しているほうを前にします。
微妙な違いですが、脚に前後があるのがお分かりでしょうか。
2つの腕パーツを肩に通します。

胸パーツを被せます。

胸パーツをパチンとハメます。ゆるくて壊れそうな時は、瞬間接着剤をちょこんとつけて固定してください。これでボディが完成しました。

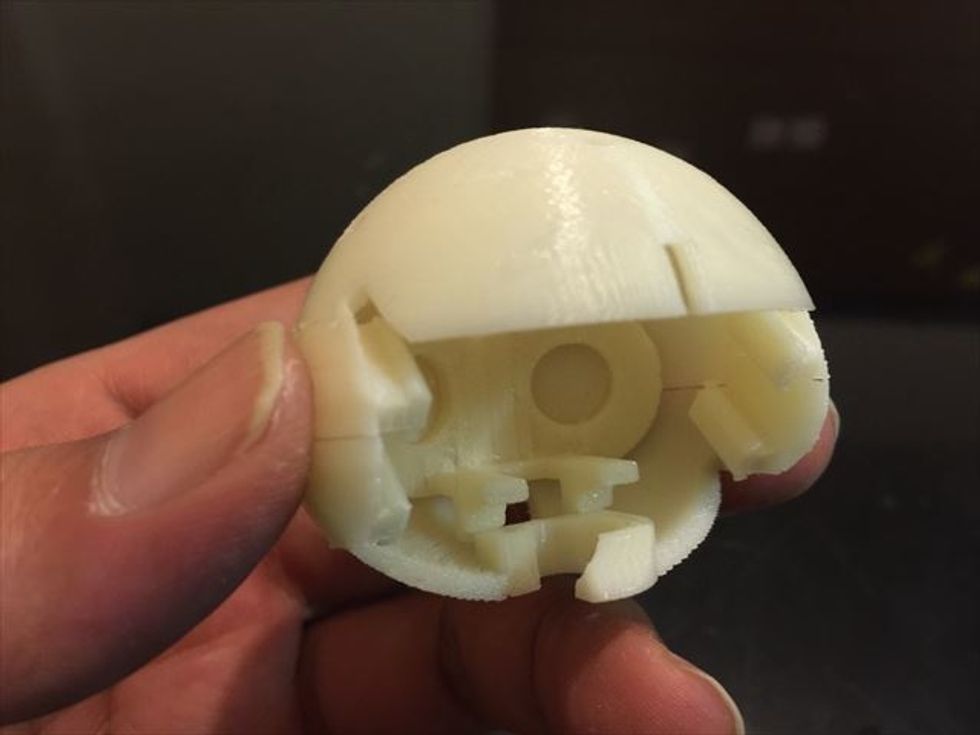
次に頭部パーツを組み立てます。

メガネパーツに目玉をハメ込みます。本当は目玉だけでも塗装したほうが可愛く仕上がるのですが、今回は省略します。
アゴパーツにメガネパーツを乗せます。
頭パーツを垂直に差し込み、アゴパーツと合体させます。

頭部の形ができあがりました。
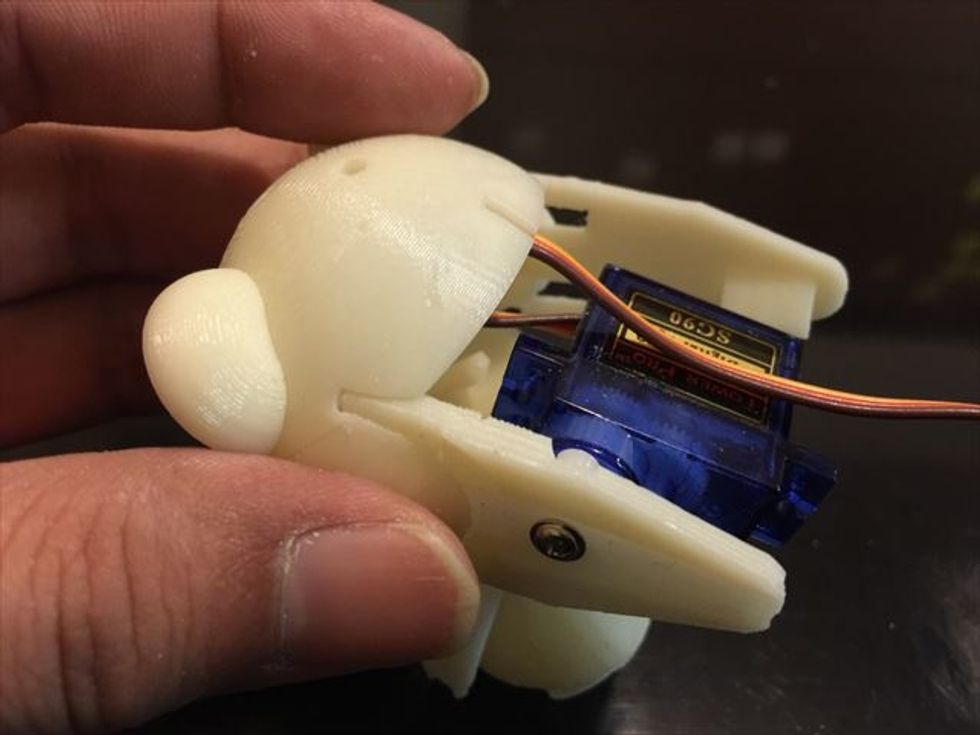
3つめのサーボを取り出し、十字型サーボホーンを差し込みます。長いほうを画面の右下に向けます。
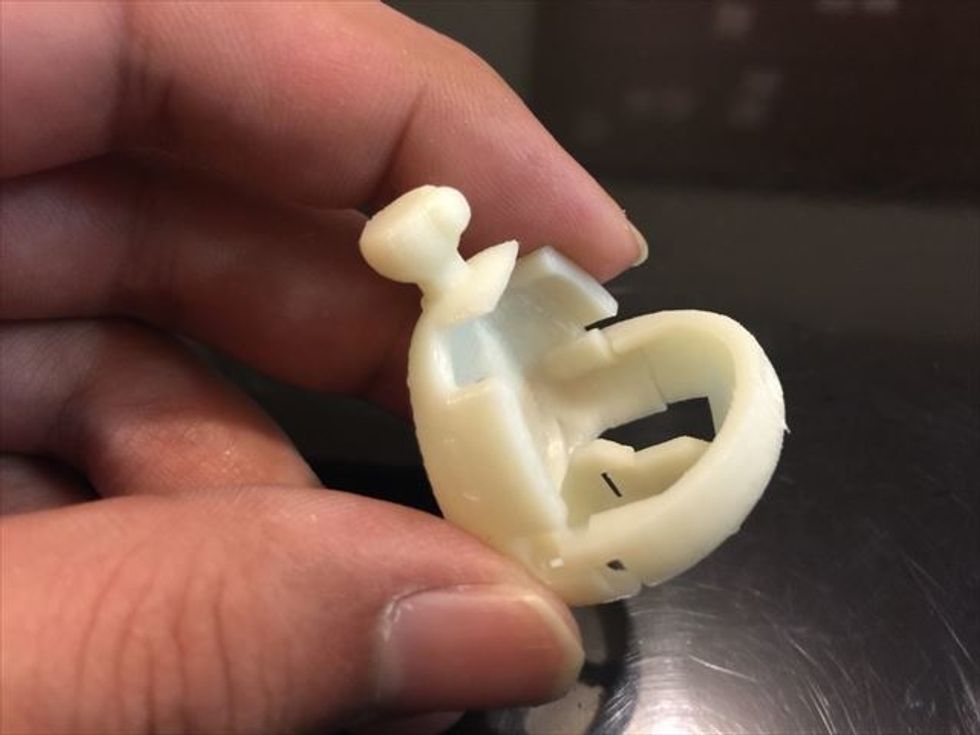
左耳パーツの裏にサーボホーンの凹みがあるので、サーボホーンをハメ込みます。向きがあり、逆向きにはハマらないようにできています。
ネジでサーボホーンを固定します。
パーツを頭部に差し込みます。

熊耳はオマケのオプションパーツです。お好みに合わせてご使用ください。
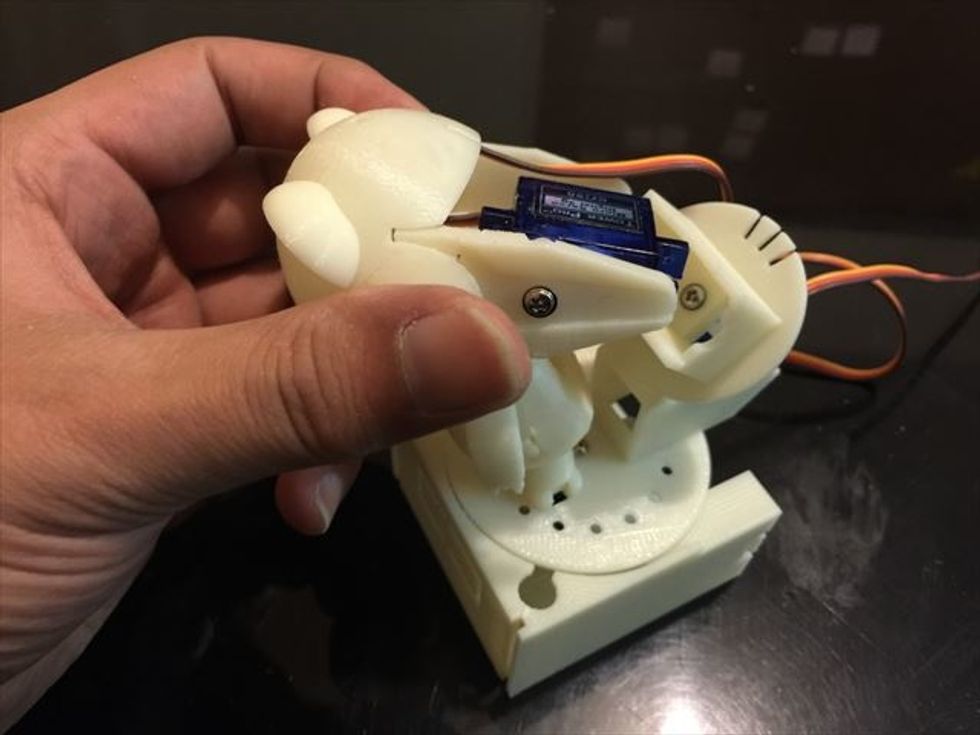
ボディを頭部パーツに取り付けます。写真のように横を向かせて首を通したあと、90度ネジるように前を向かせるのがコツです。

頭部とボディの向きを合わせます。
頭とアゴを固定するため、右耳パーツを差し込みます。
これで最後です。足の裏の穴に足首パーツを差し込み、頭部のサーボをコネクタのサーボホルダーに差し込みます。
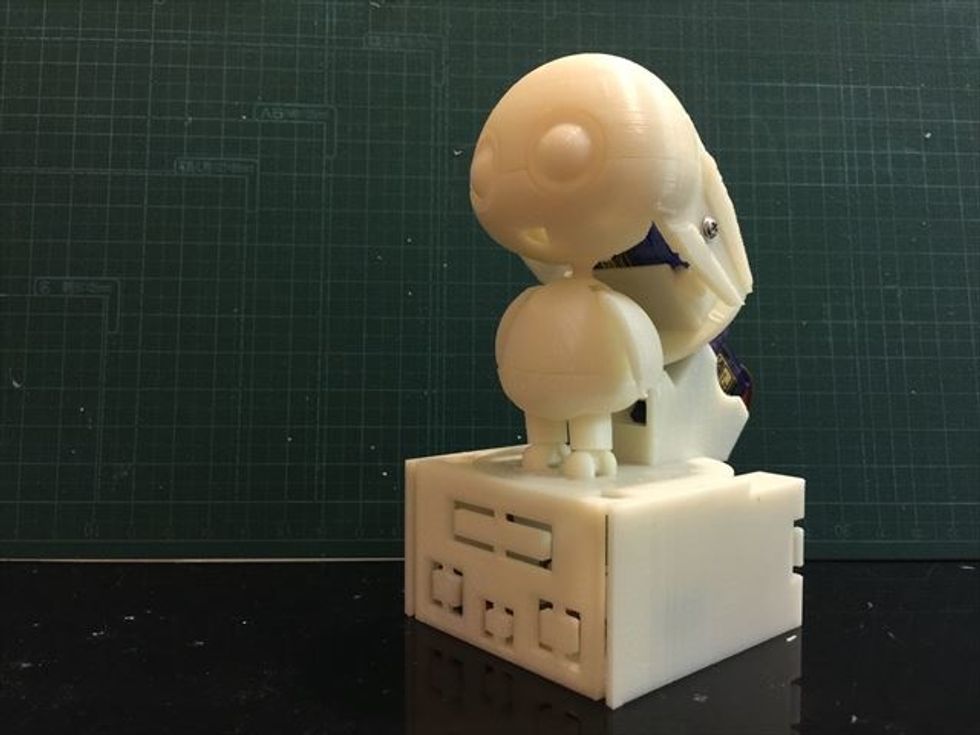
完成です。お疲れ様でした。