The Conversation (0)
Sign Up
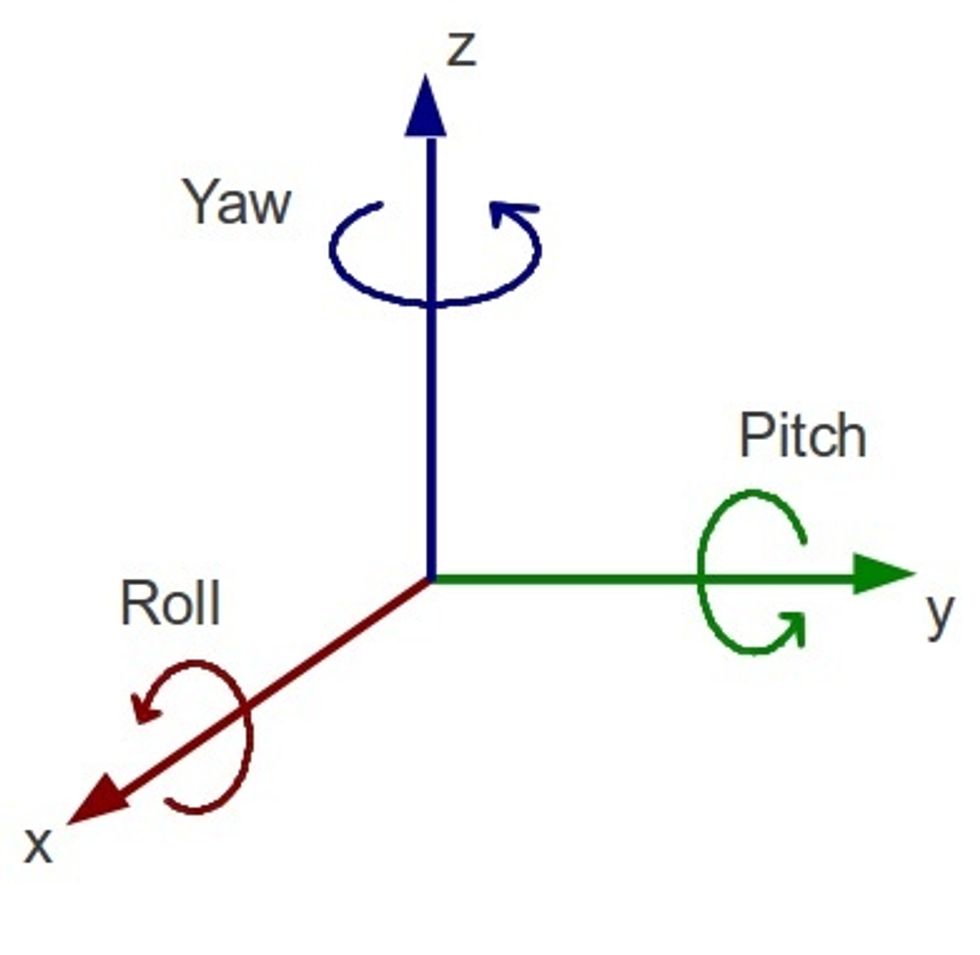
ベゼリーには3つのサーボが使われていますが、首の縦振りをPitch、首の横回転をRoll、体の横回転をYawと呼んでいます。
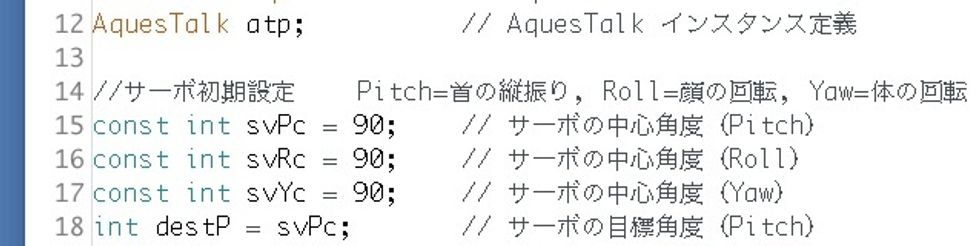
ここでサーボの中心位置を決めています。基本は90度ですが、ずれている場合は調整してみてください。

声の質を設定しています。SetAccentはアクセントの強さで最弱0標準64最強255。SetPitchは声の高さで最高0標準64最低255。SetSpeedは発話速度で最遅50標準100最速300。

Studuino miniの場合アナログ入力ピン6(A6)には照度センサーが取り付けられております。ここでは明るさが200以上の場合のみ下記の処理を行えと記述されています。暗い場合は処理を行いません。
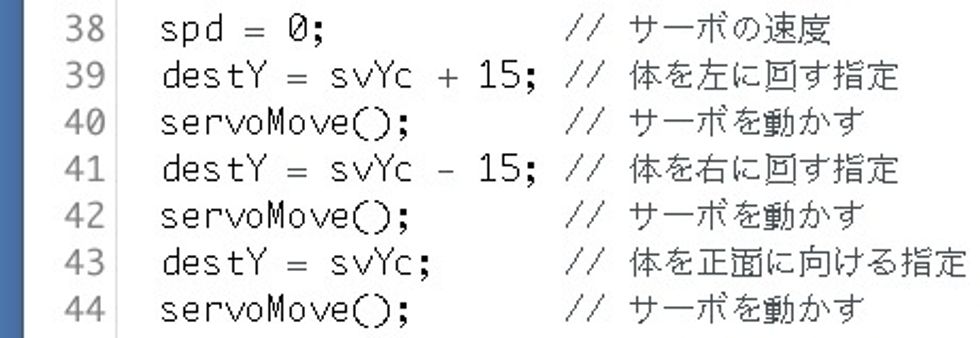
ここで体を横回転させています。変数spdに回転速度、変数destYにY軸の目標角度を代入し、servoMove()関数を呼べばサーボが回転します。

atp.Synthe()はもうご存知だと思いますが、AquesTalk pico LSIに喋らせる関数です。
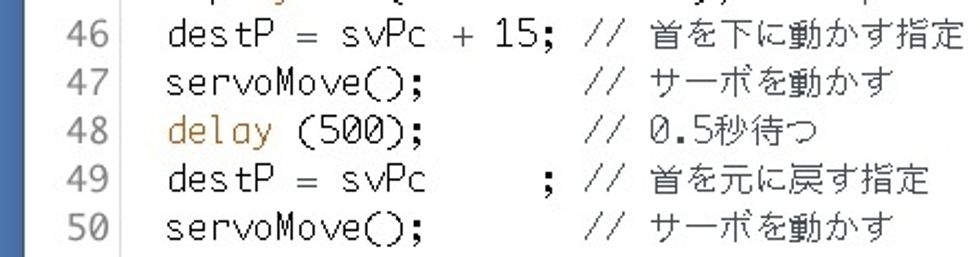
ここでは首を上下に動かしています。destPは首の縦振り(pitch)の目標角度です。
ここで首を横振りさせています。destRは首の横振り(Roll)の目標角度です。

ここでデジタルIOにサーボを割り当てています。