The Conversation (0)
Sign Up
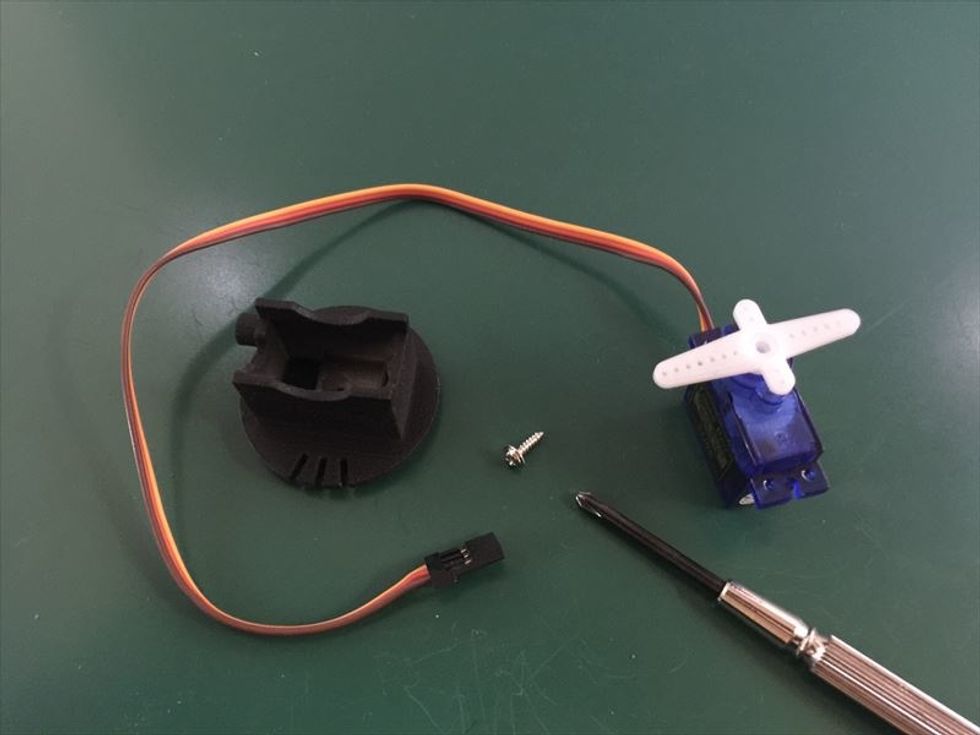
細身のプラスドライバーだけあれば組み立ては可能です。ニッパーやラジオペンチもあると役に立ちます。

パッケージの中身を取り出します。(色は写真と異なる場合があります)

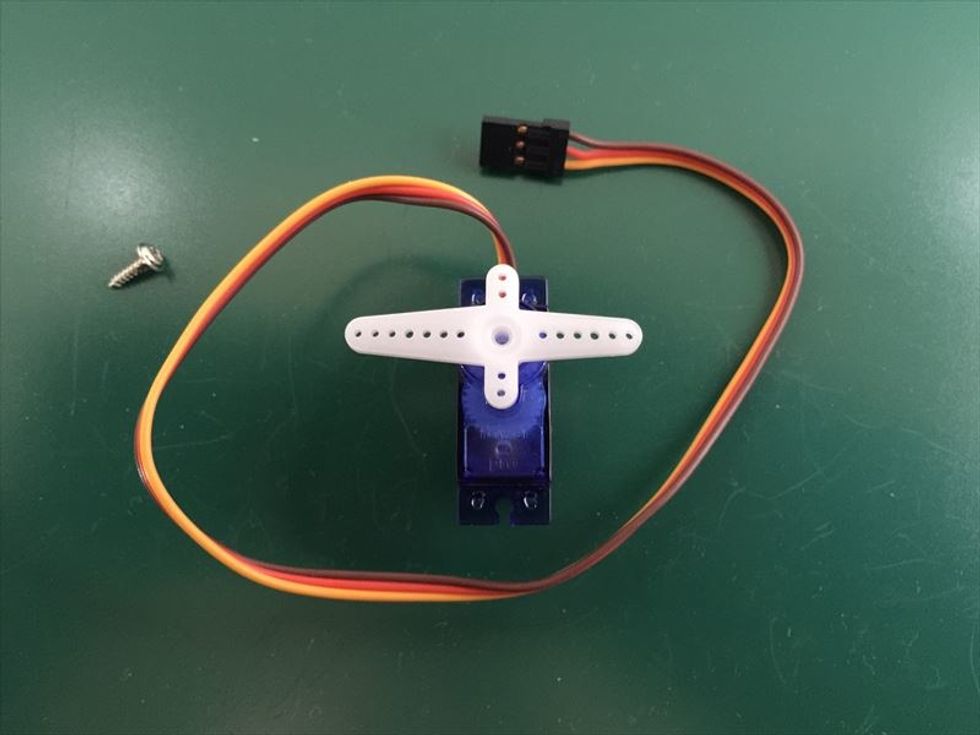
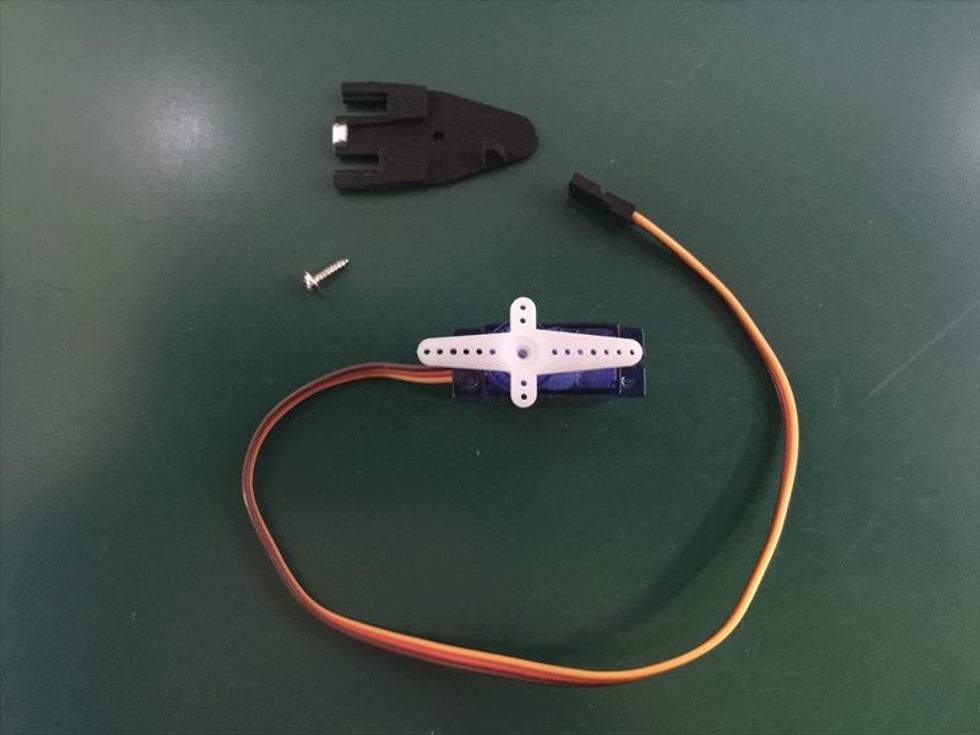
サーボは3つ入っていますが、まずひとつ目を取り出します。サーボホーン(白いプラスチック)は3種類入ってますが、十字型のものだけを使います。ネジは長いもの2つと短いもの1つが入ってますが、長いものだけを使います。
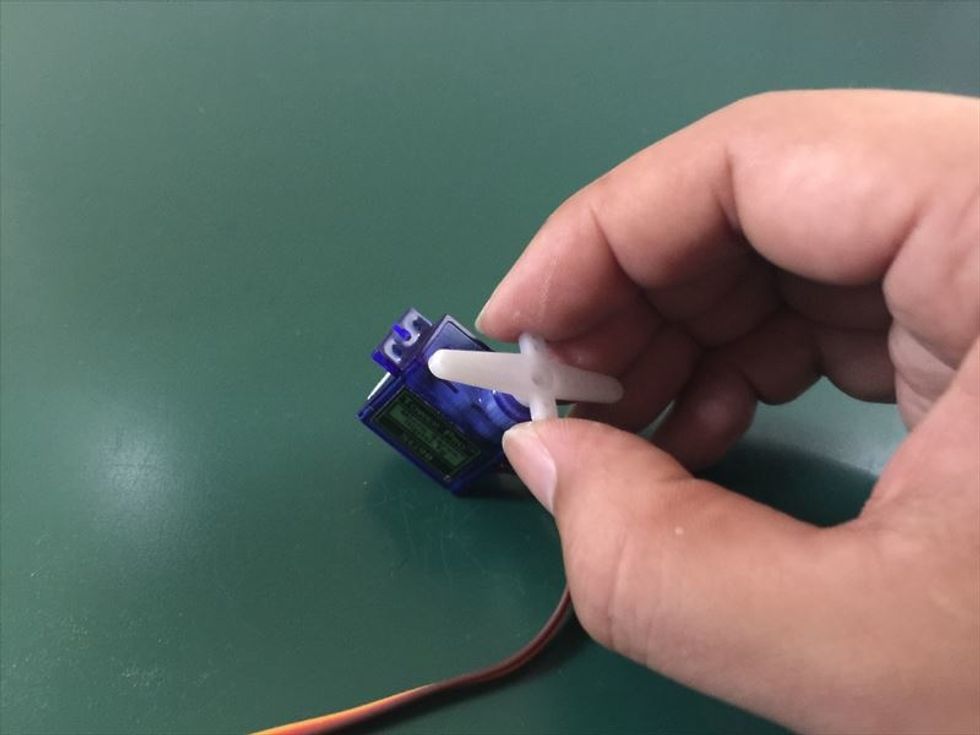
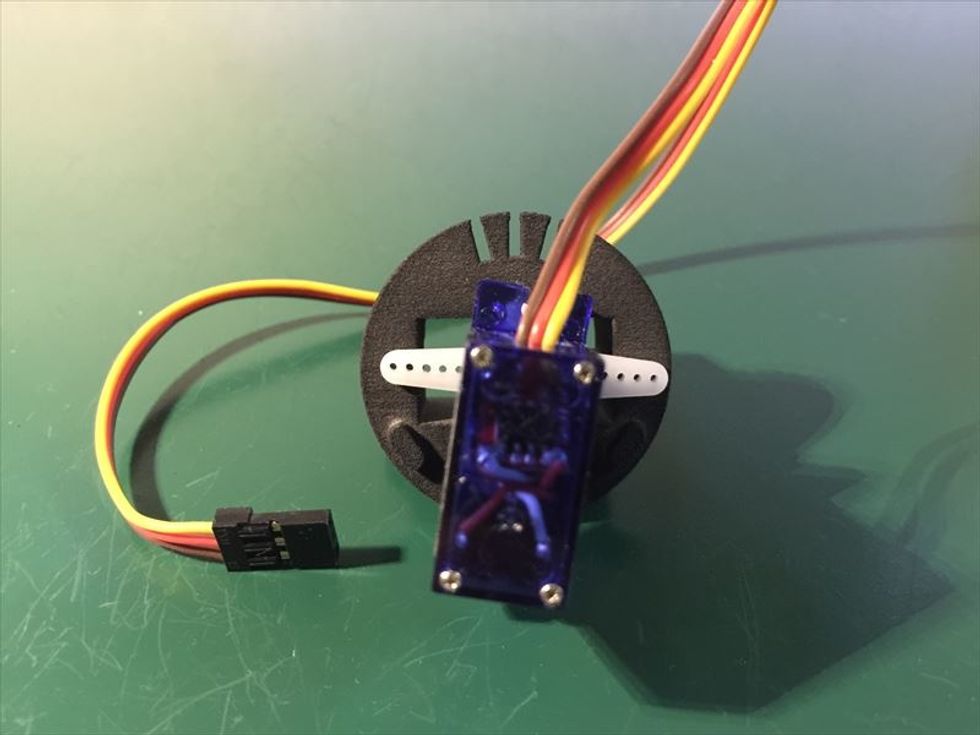
簡易的にサーボをセンタリング(中央合わせ)します。このサーボは約180度回ることができるので、片側に回しきったあと、90度戻せば、だいたい中心にできます。
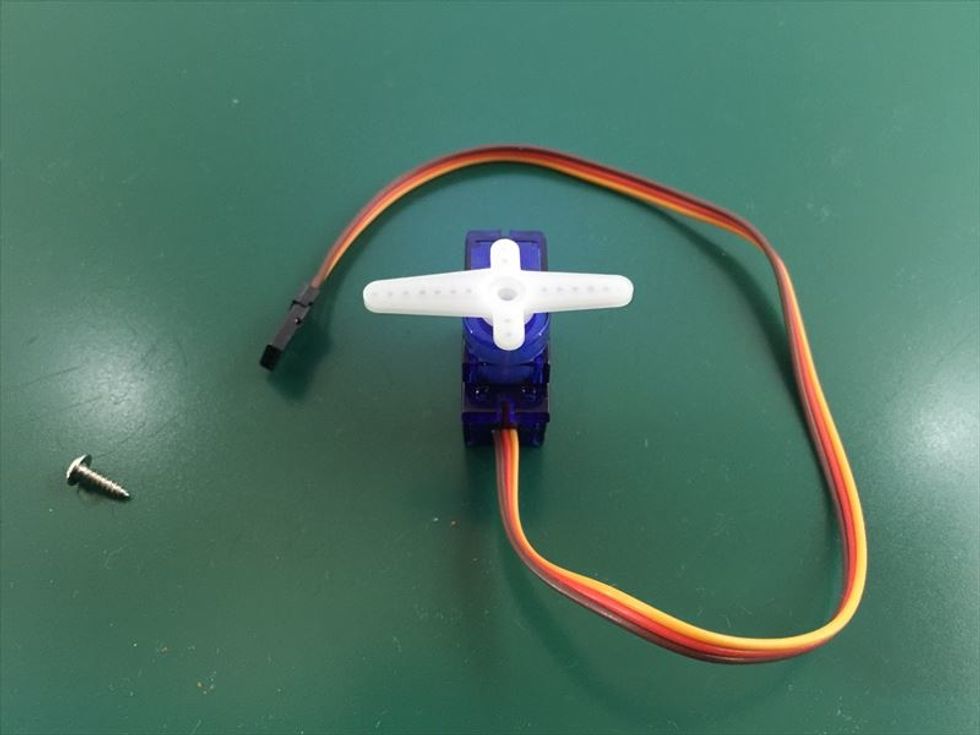
十字型のサーボホーンを、写真の向きに合わせてサーボにハメ込みます。このサーボホーンは左右の長さが微妙に違います。長いほうを、左側に向けます。
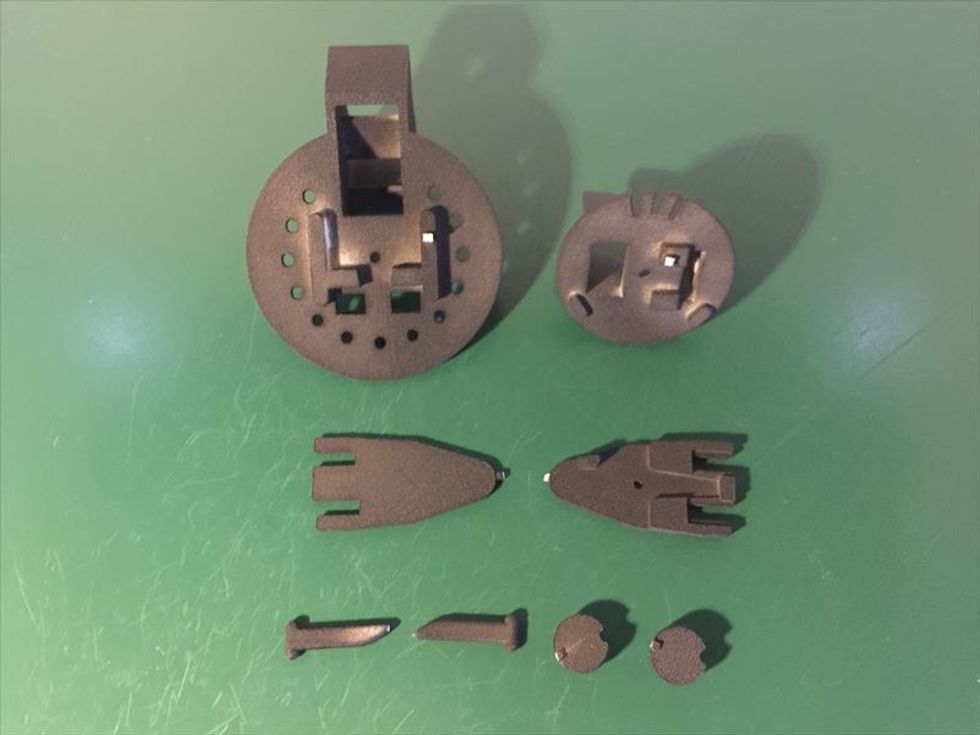
黒いパーツを用意します。ランナーやランナーの跡がついている場合は、ニッパーなどで形を整えます。
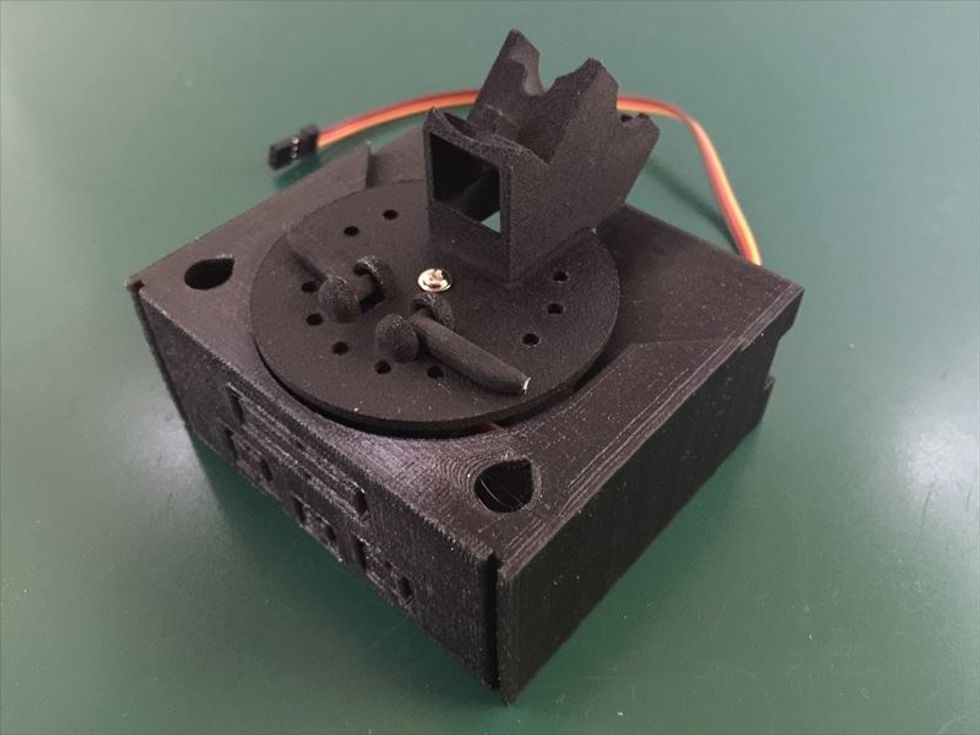
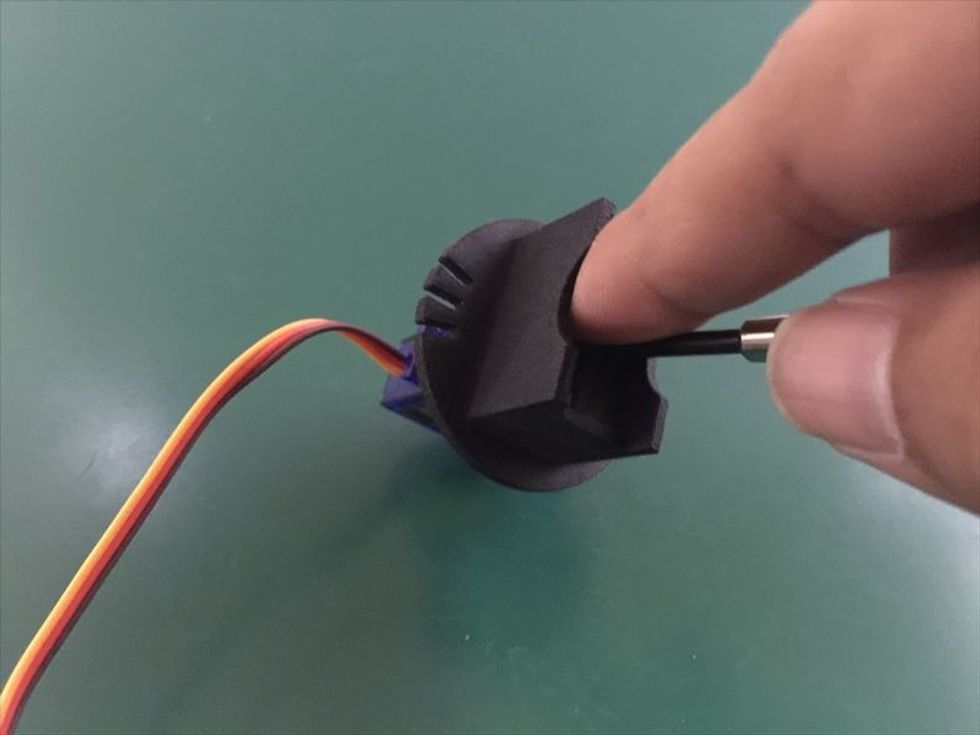
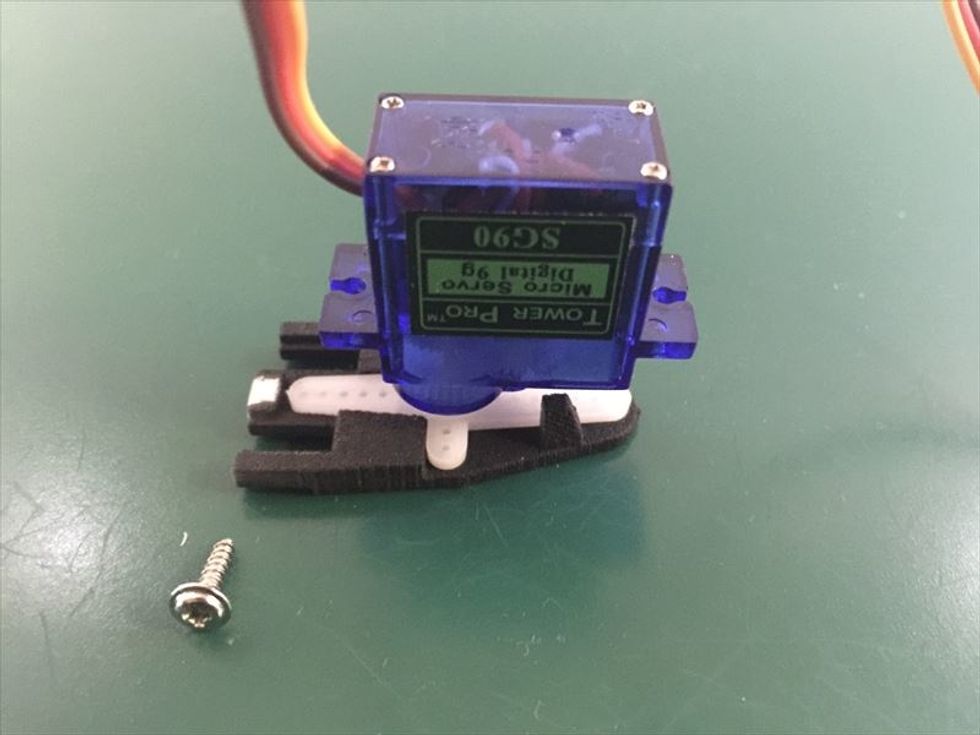
サーボホーンを回転台の裏の窪みにハメます。サーボホーンの長いほうを上に向けてください。
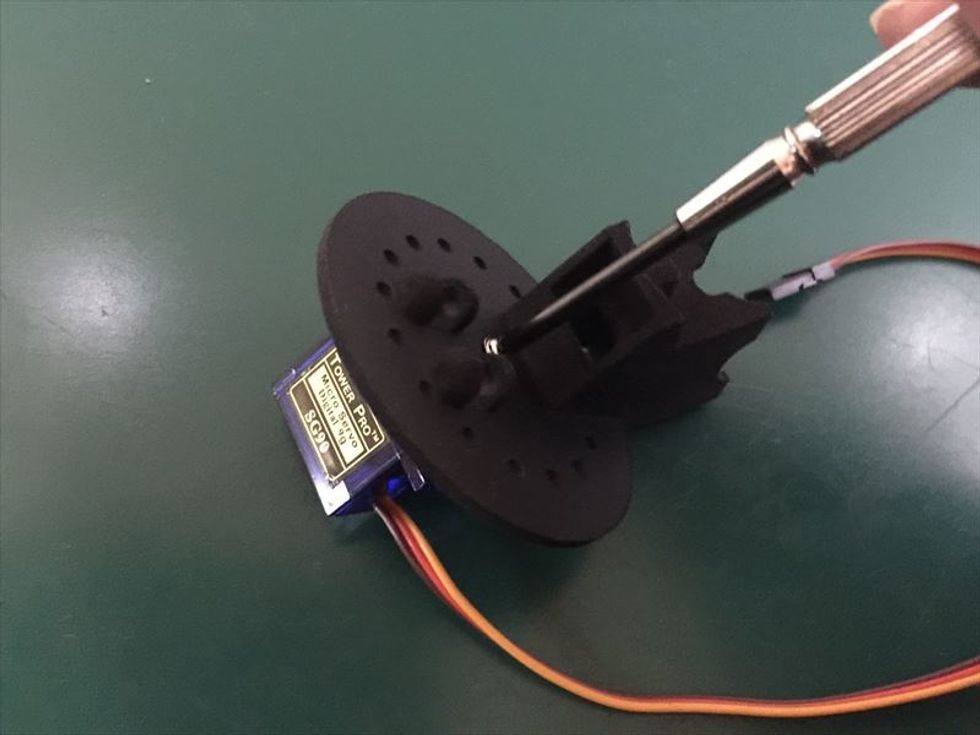
サーボに付属していた3本のネジのうち、長いほうのネジを使い、細身のプラスドライバーでサーボを固定します。
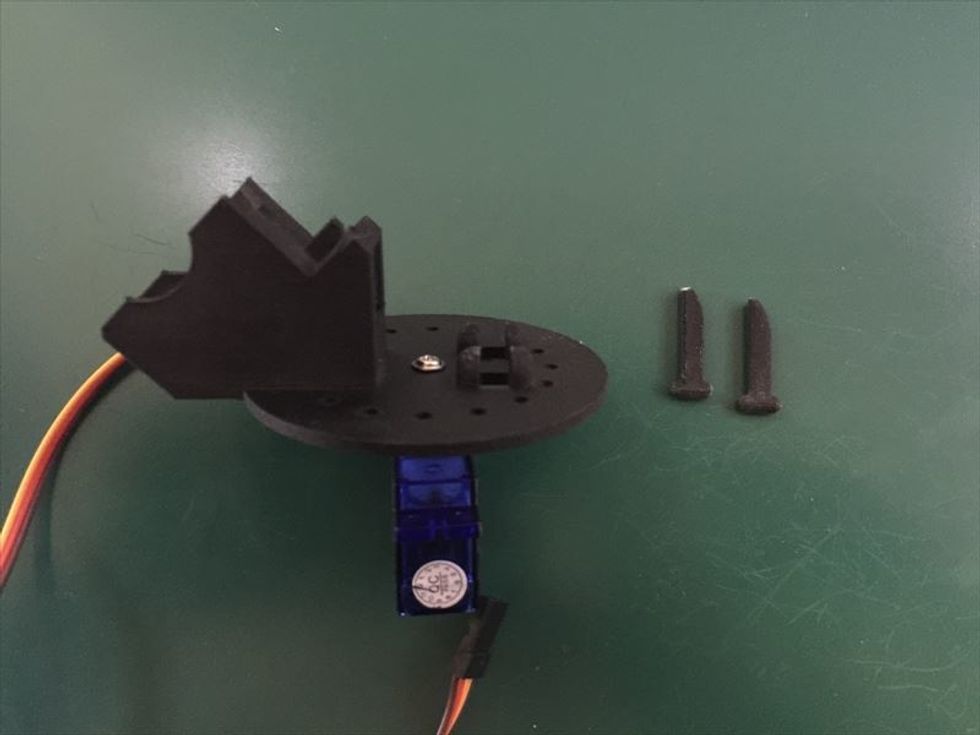
足首のパーツを2つ取り出してください。これを回転台にハメるのですが、向きに注意してください。斜めにカットされているほうが前方です。
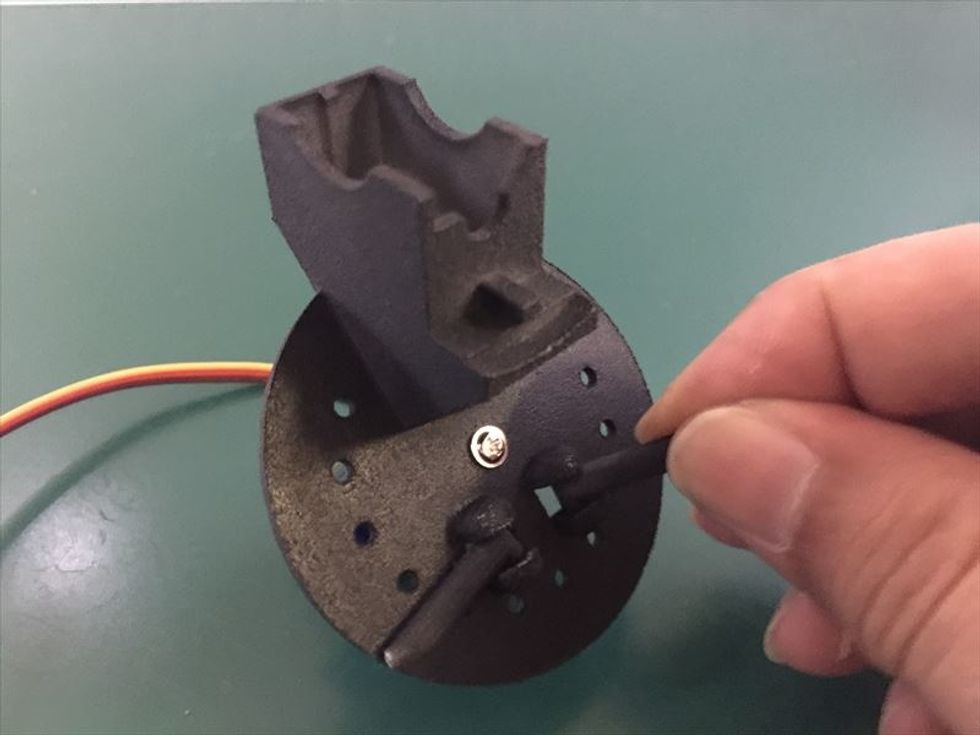
足首を回転台の軸受けにハメます。斜めに差し込んだあと、指で回転させます。うまく指の力が入らないひとはラジオペンチを使って回してください。
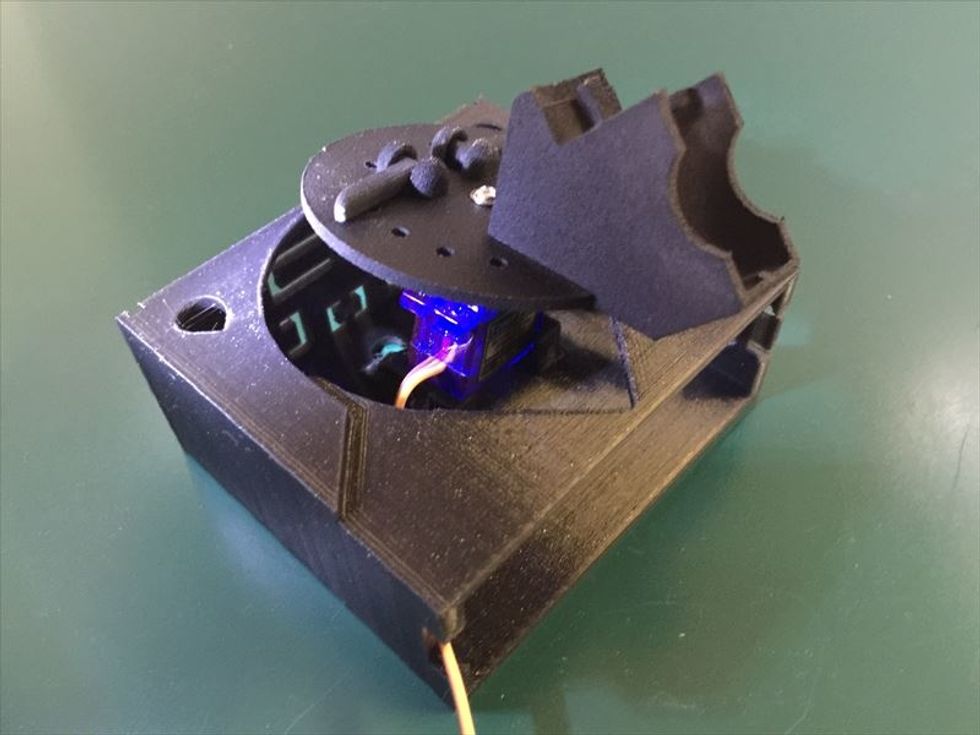
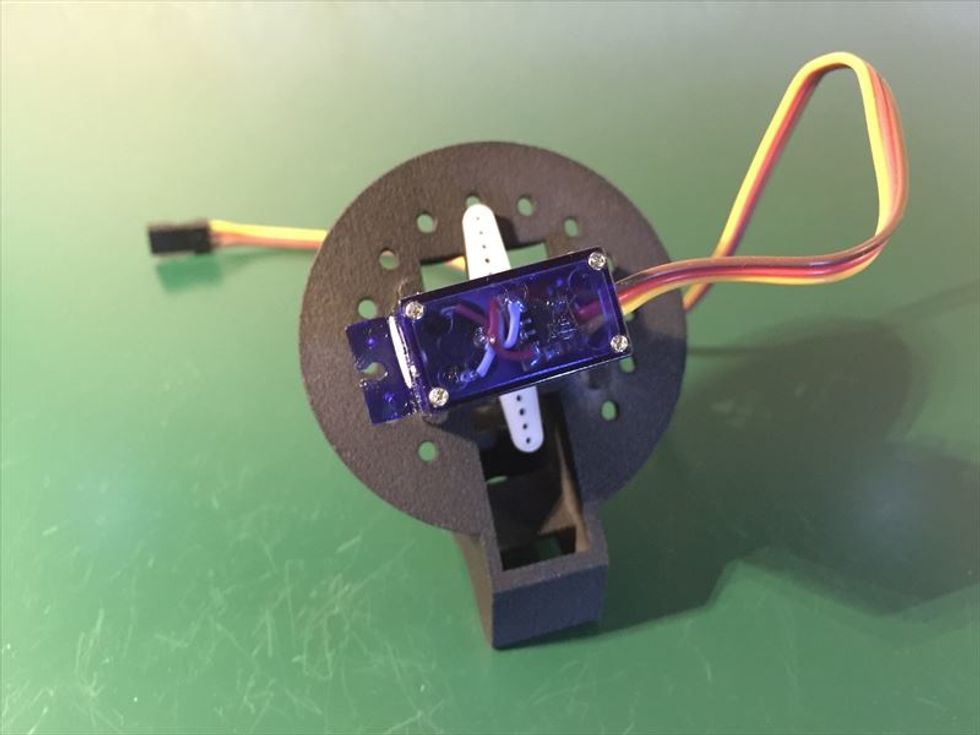
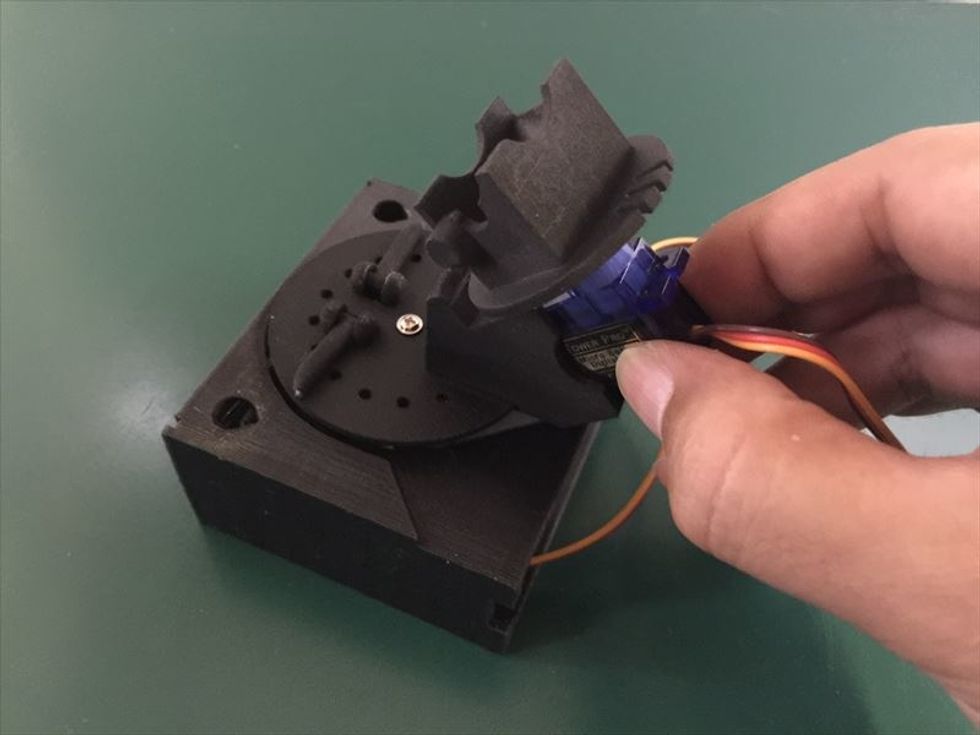
サーボを台座のサーボホルダーにハメます。サーボホルダーにはサーボのケーブルを出すためのスリットが開いてますので、サーボの向きを合わせてください。
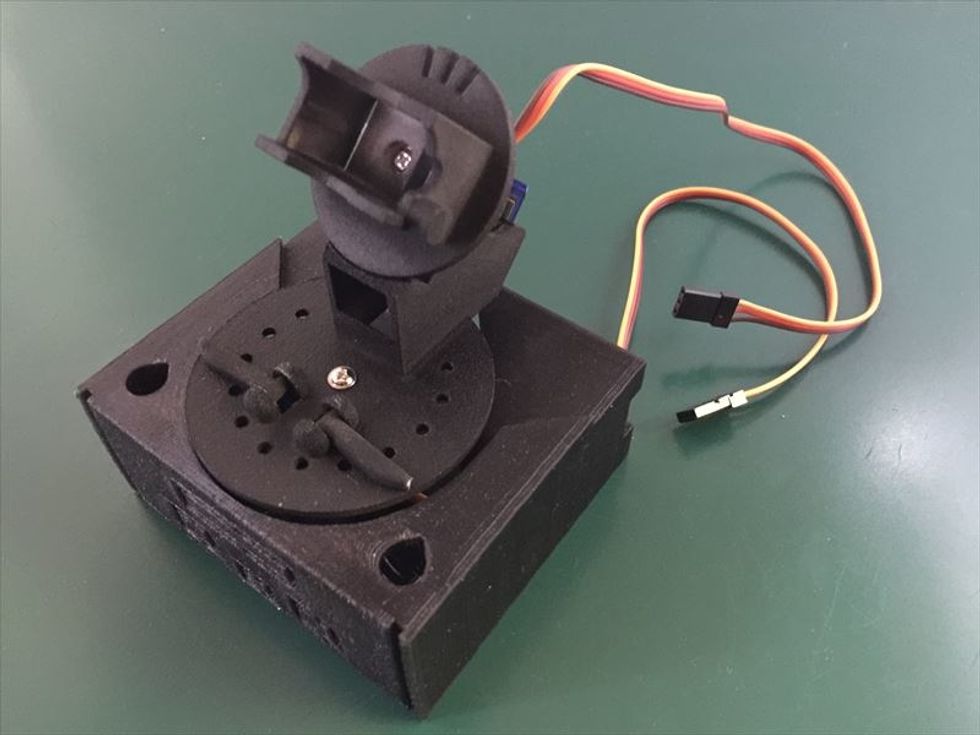
台座と回転台が合体しました。
2つめのサーボを取り出し、前述の方法でセンタリングした後、十字型サーボホーンを写真の向きに取り付けます。長いほうを左に向けます。
ジョイントパーツを取り出します。このパーツは2つのサーボをつなぐ役割を持ちます。
サーボホーンをジョイントの裏に当てます。長いほうを右側に向けます。
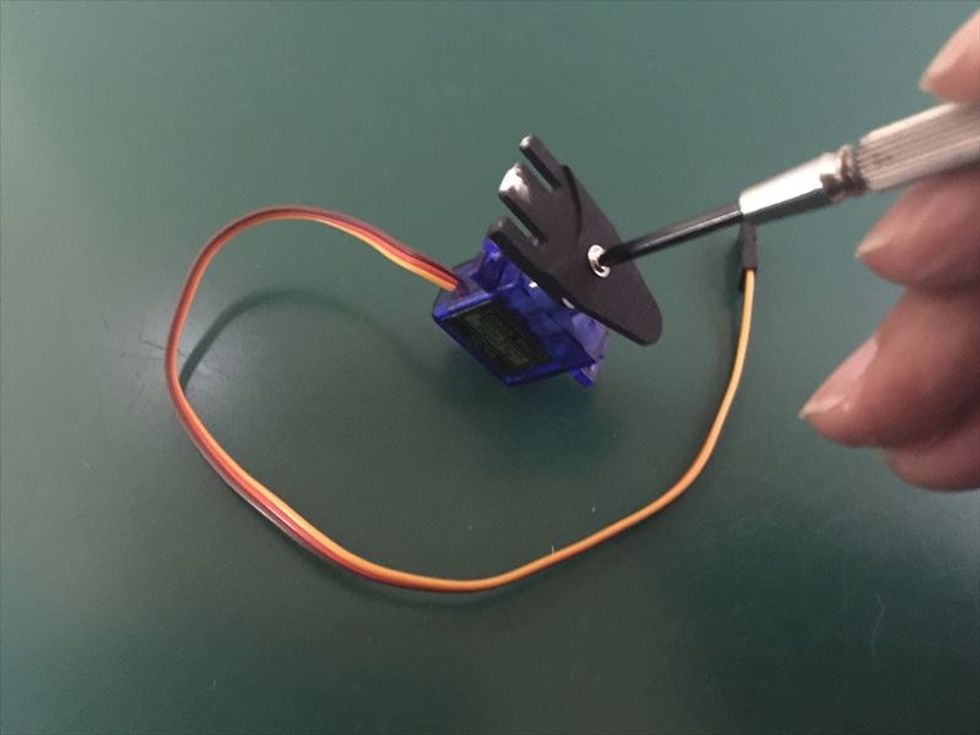
ジョイントとサーボを、サーボ付属の長いネジで固定します。ジョイントの中は狭いので、人差し指やラジオペンチなどを使ってうまくネジを差し込みましょう。
サーボを回転台のサーボホルダーにハメ込みます。差し込む向きにご注意ください。
台座にジョイントが合体しました。
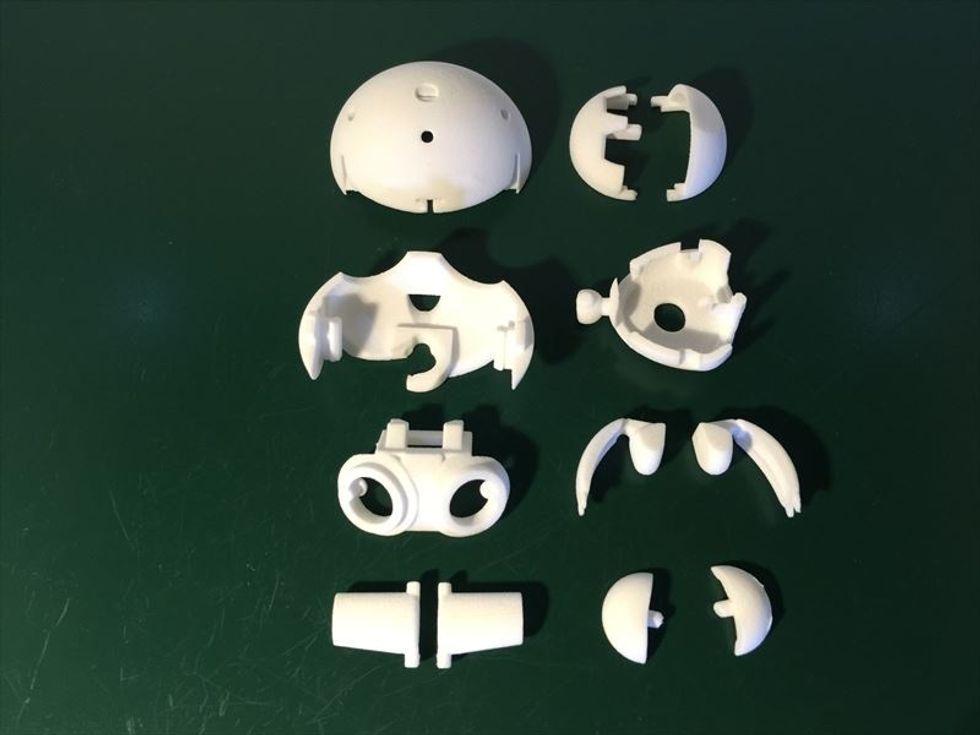
ロボットの組み立てを始めます。ランナーやランナーの跡がついている場合は、ニッパーなどで綺麗に整えてください。

まずは頭部ユニットを組み立てます。パーツを並べてみましょう。

メガネに目玉をハメ込みます。

アゴの上にメガネを乗せます。

アゴの上に頭を乗せます。パチッとハメます。
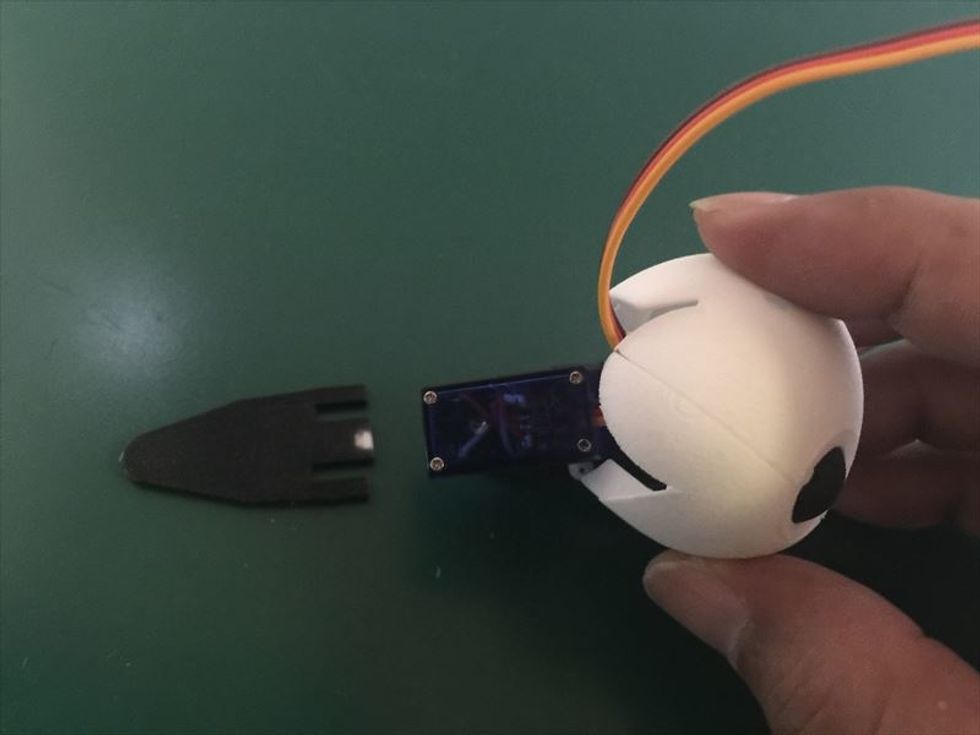
3つめのサーボを取り出し、センタリングした後、十字型サーボホーンを写真の向きに差し込みます。長いほうが右です。次のステップで左クシを使うので用意してください。
左クシの裏の窪みに、サーボホーンを当てます。長いほうを右側に向けます。
長いほうのネジでサーボを固定します。

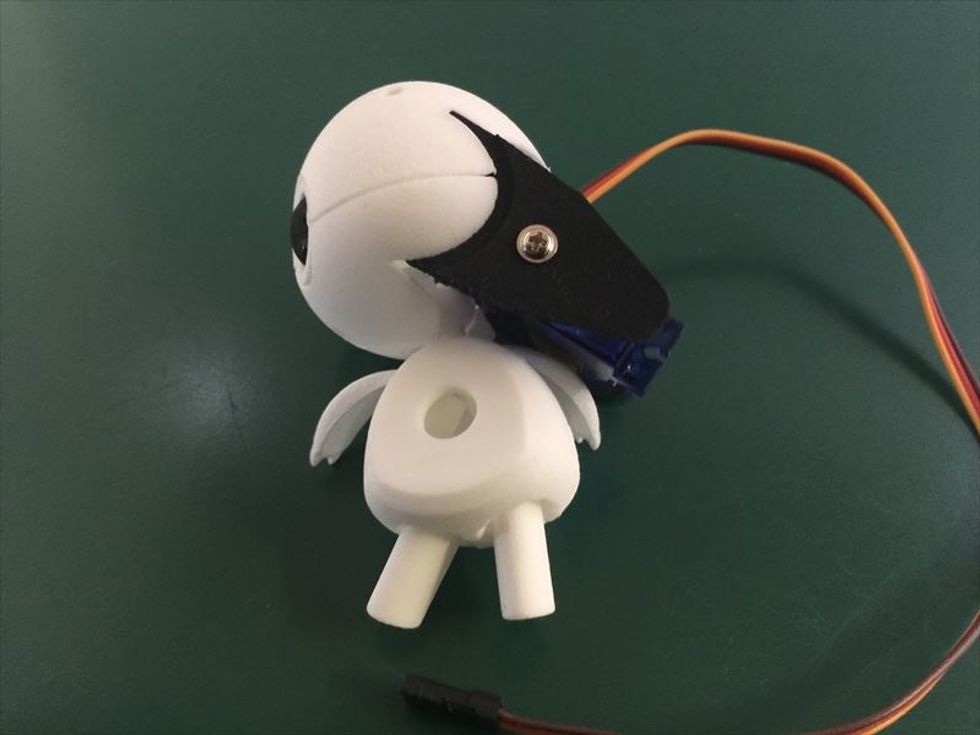
サーボごと左クシを頭部に差し込みます。頭パーツとアゴパーツはクシによって固定される仕組みです。
次に右クシも差し込みますが、向きに注意してください。長いほうが上です。

右クシを頭部に差し込んだら、頭部の完成です。
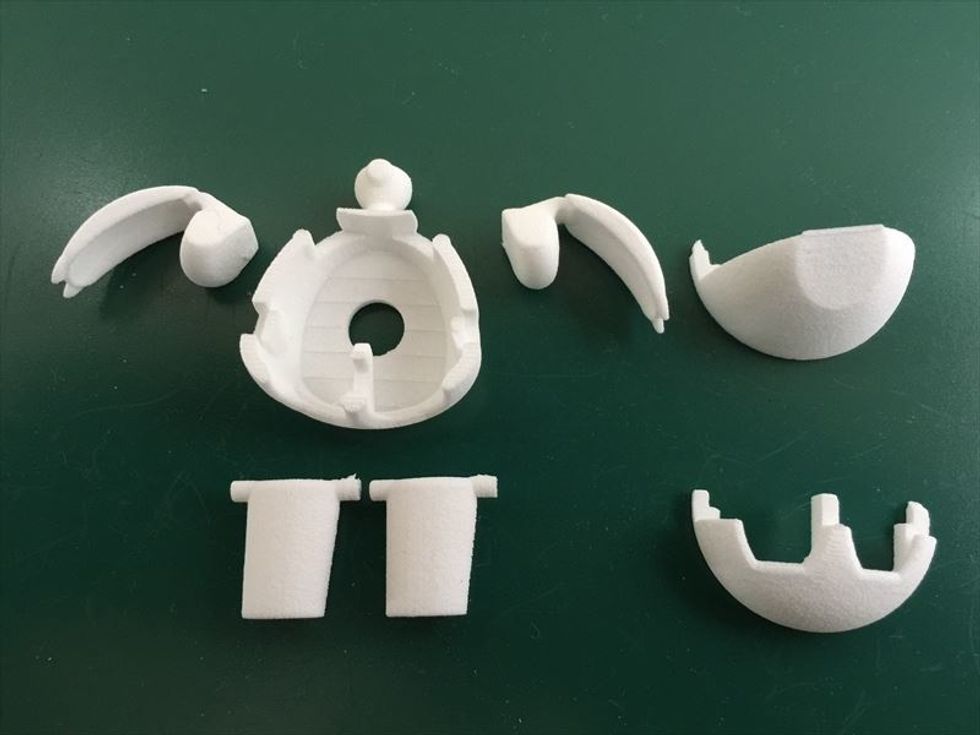
次にボディを組み立てます。パーツを並べてみてください。

背中パーツに腹パーツを差し込みます。

次に足を差し込むのですが、足パーツには前後の向きがあるのでご注意ください。斜めになっているほうが前です。

胴体の穴に2つの足をストンと落とします。
両腕を背中パーツの肩に通します。腕パーツに前後は無いので、どちら向きでも構いません。
胸パーツをハメ込みます。
頭部とボディをつなげます。まずは頭部の首の穴に、横向きにボディ側の首を差し込みます。
ボディを回転させて、頭部と向きを合わせます。

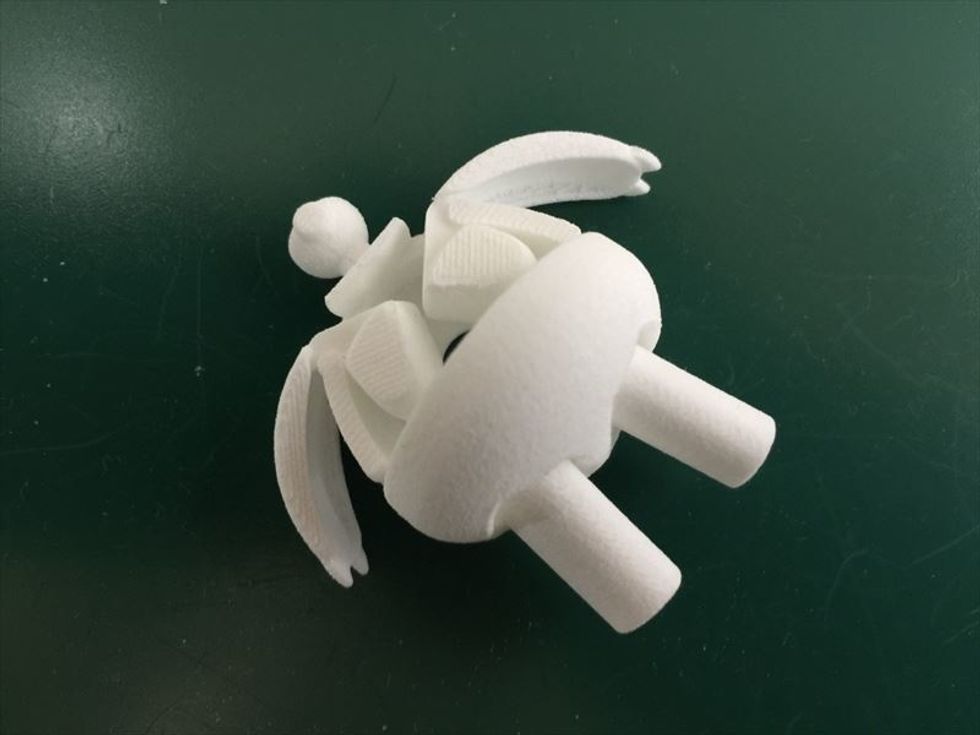
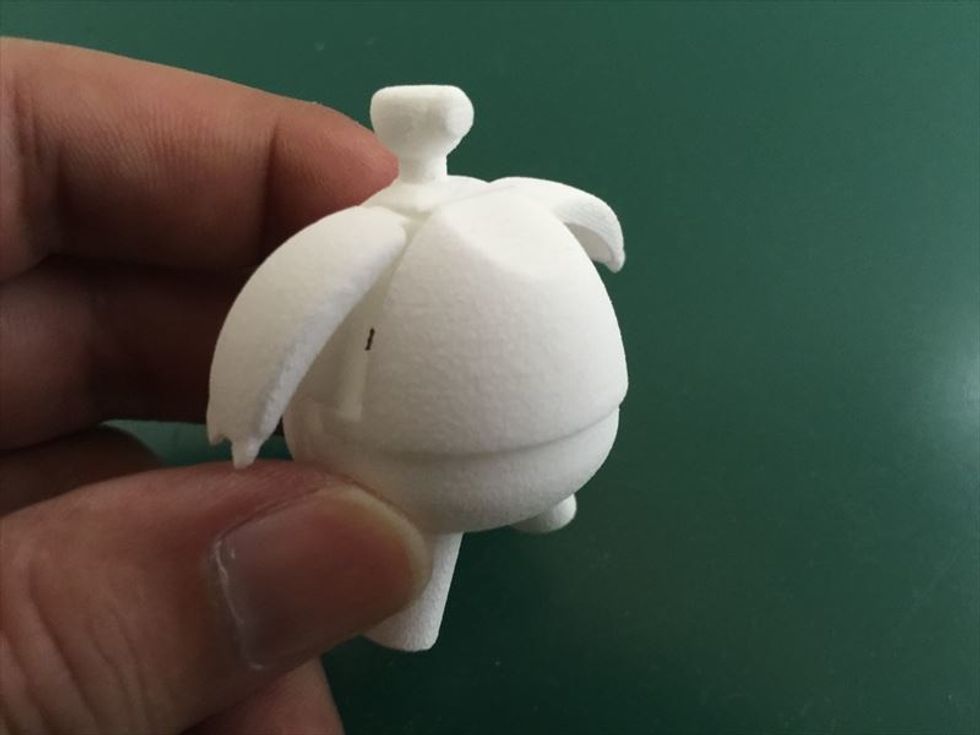
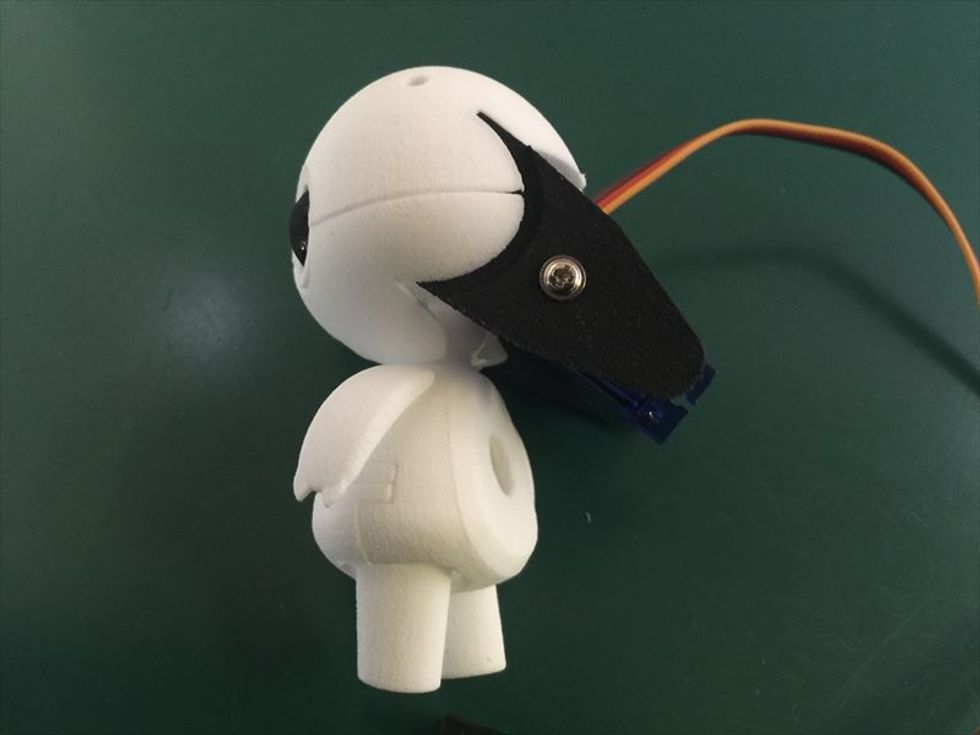
ロボットが完成しました。
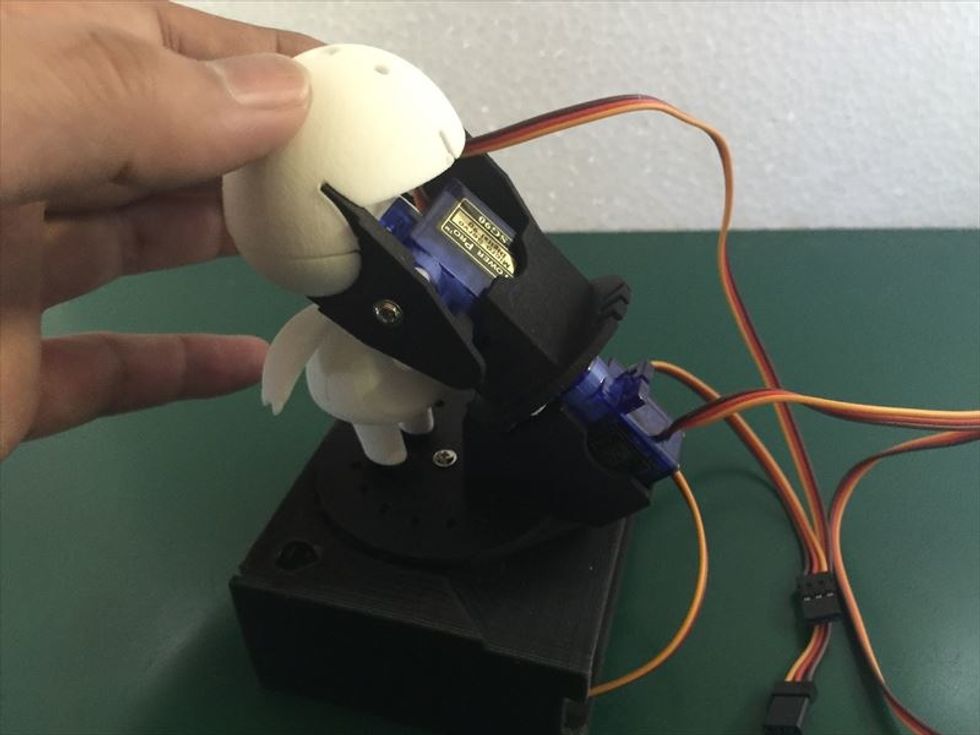
ロボットを台座に取り付けるため、まずは足の裏の穴に、足首パーツを差し込みます。
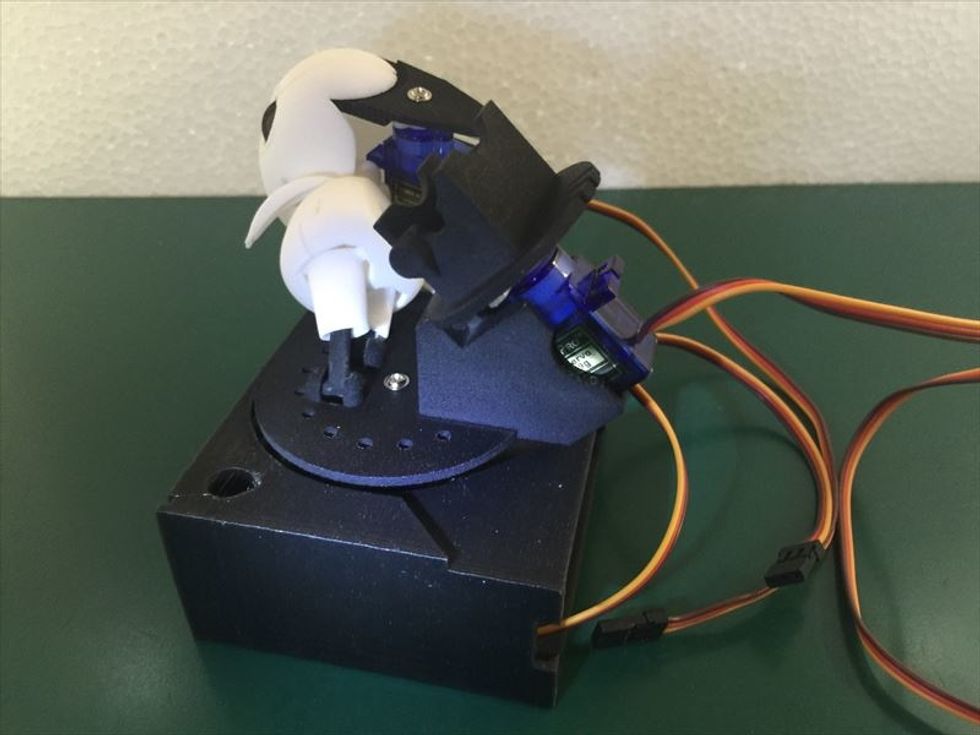
頭部のサーボをジョイントのサーボホルダーに差し込みます。

ロボットが台座に固定されました。

おまけとしてパンダ耳がついてますが、オプションパーツですのでお好みで取り付けてください。