The Conversation (0)
Sign Up
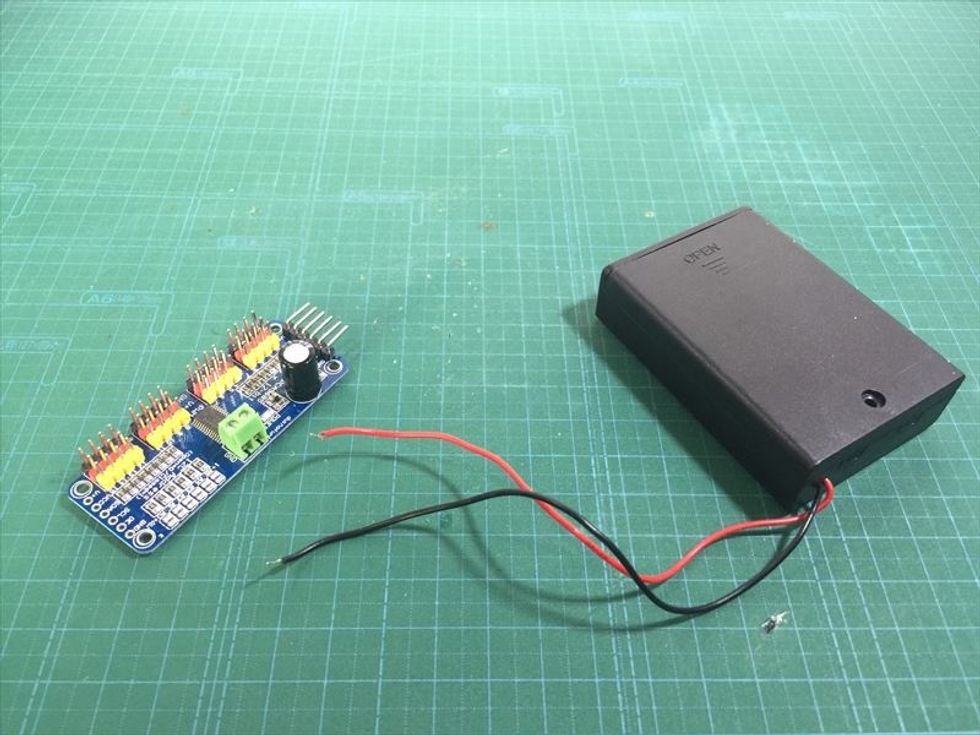
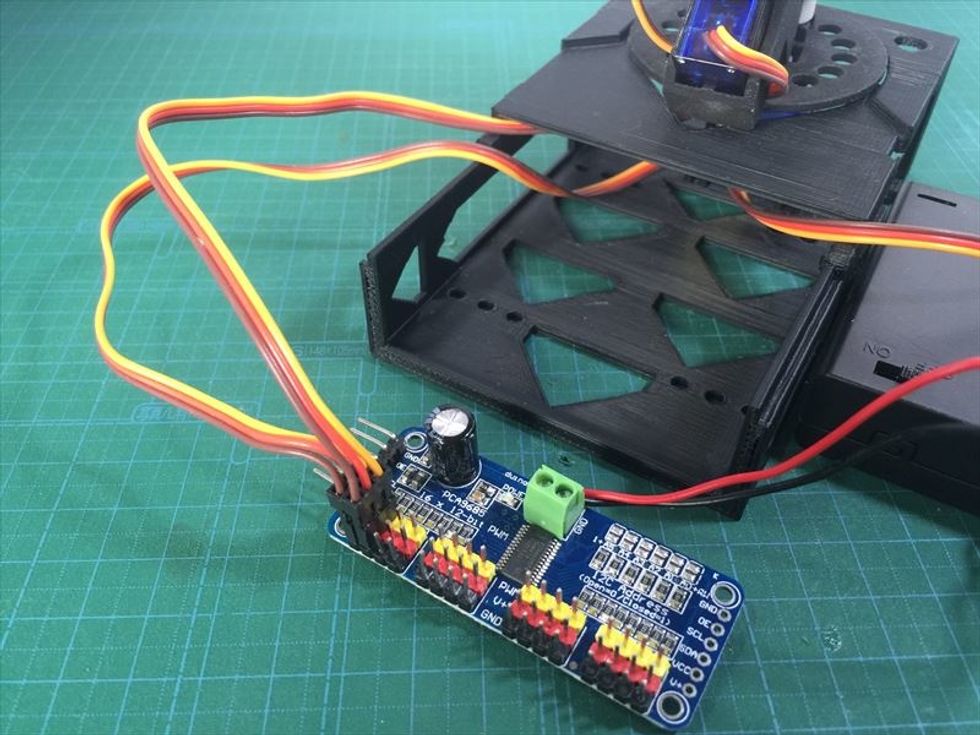
まずはサーボドライバーボードに電池ボックスを接続しましょう。
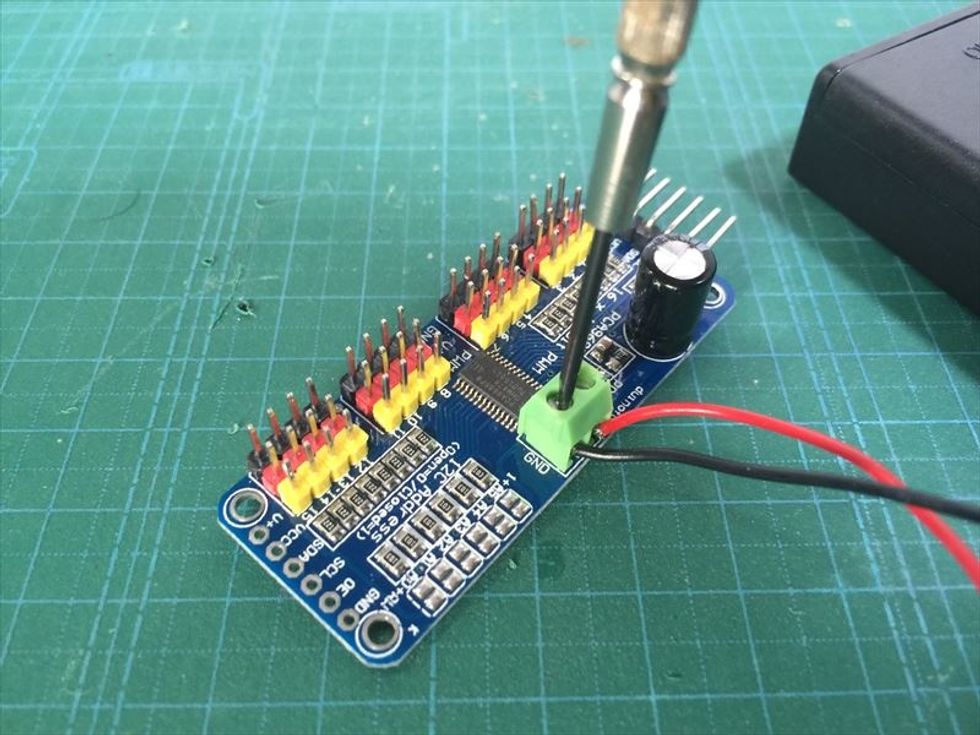
細いマイナスドライバーでネジをゆるめると、横穴に隙間ができるので、そこにケーブルを差し込んでネジをしめます。左の穴(GND)が黒、右(V+)が赤です。ケーブルを引っ張ってみて、ちゃんと固定されているかどうか試しておきましょう。
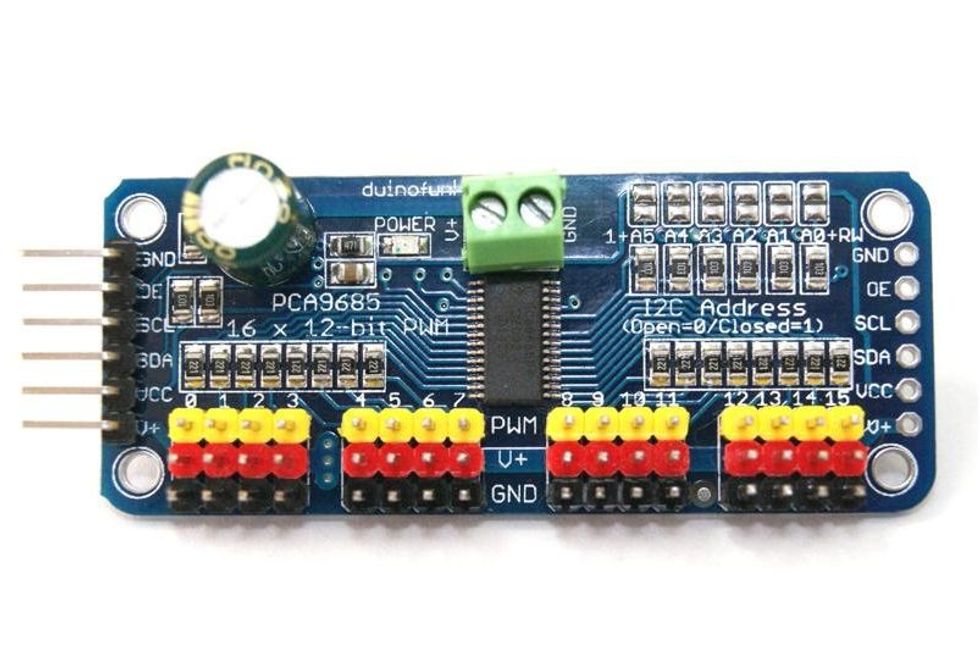
サーボドライバーボードにサーボのケーブルをつなぎます。下端に並んでいるのが接続端子で、左端の0番から2番までを使います。黒がマイナス(GND)、赤がプラス(V+)、黄色が信号線(PWM)です。
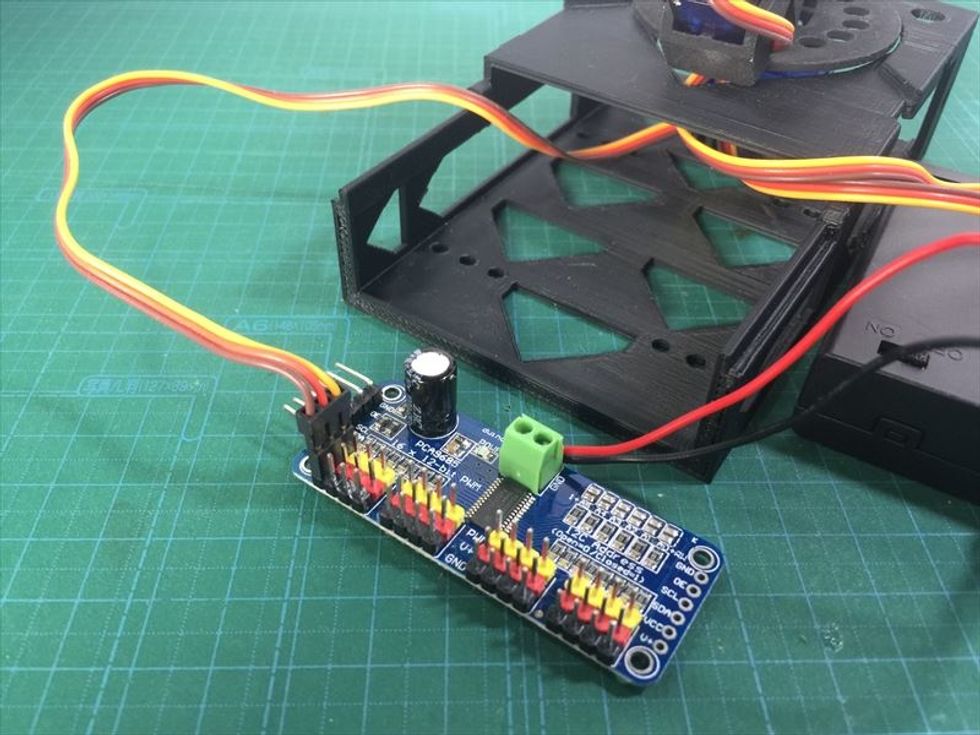
台座の中のサーボ(yaw)をサーボドライバーボードの0番に接続します。ケーブルの色と端子の色が合う向きに差し込んでください。サーボのGNDは茶色ですけど。
次にジョイントパーツのサーボ(rotation)のケーブルを、1番につなぎます。
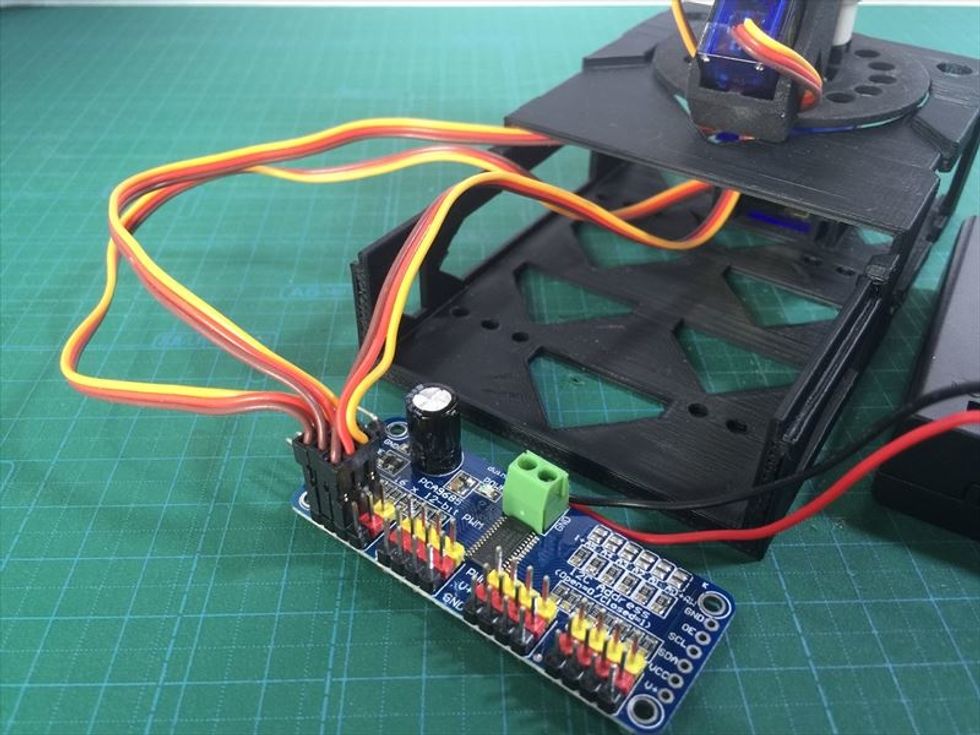
最後に頭部のサーボ(pitch)のケーブルを2番につなぎます。
こんな感じになったでしょうか?

サーボドライバボードを台座の中に入れましょう。サーボのケーブルをいったん前面からひっぱり出すと、きれいに収まります。ボードを固定したい人はボルトとナットで止めてもいいですが、狭いのでちょっと難しいです。

電池ボックスを後方から差し込みます。
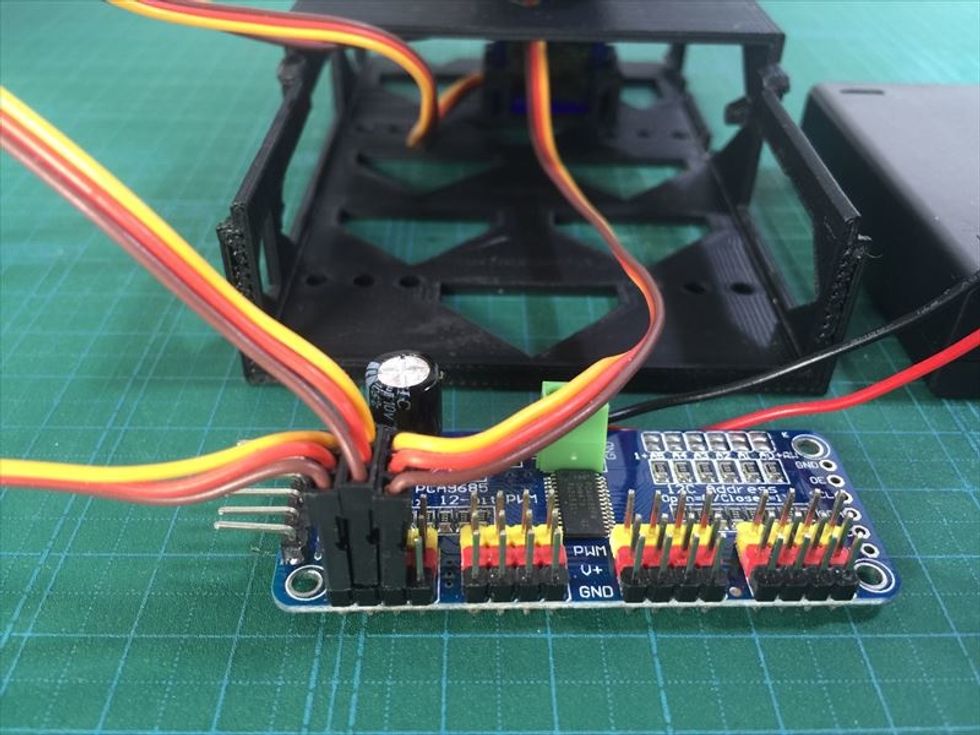
サーボドライバボードとラズパイを接続するため、まずはサーボドライバーボードにケーブルをつなぎます。いちばん左がGND、ひとつ空けてI2C線が2本、そして3Vの電源です。
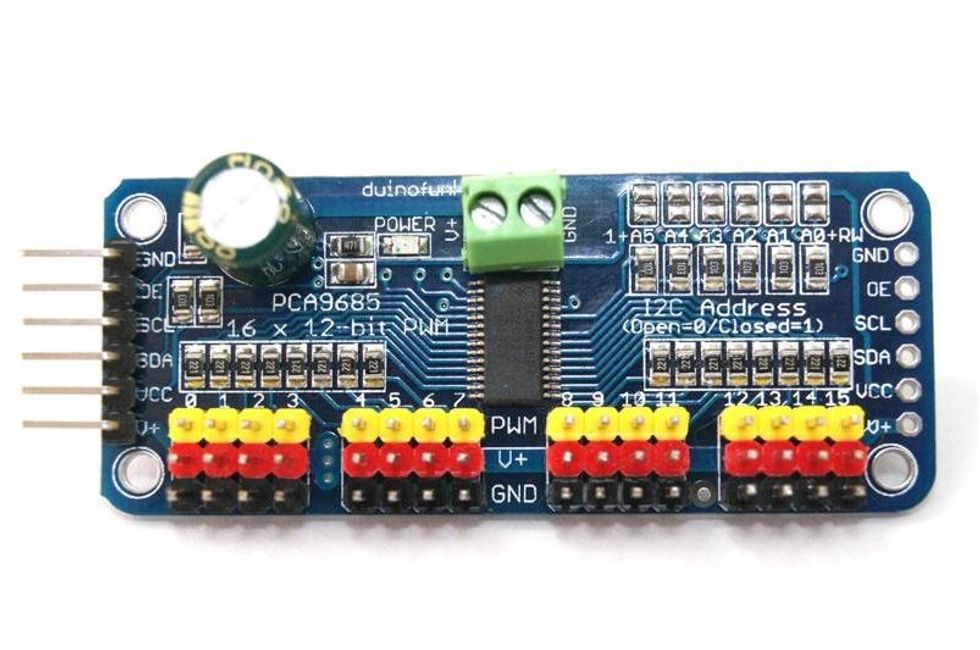
サーボドライバーボードの端子をご確認ください。

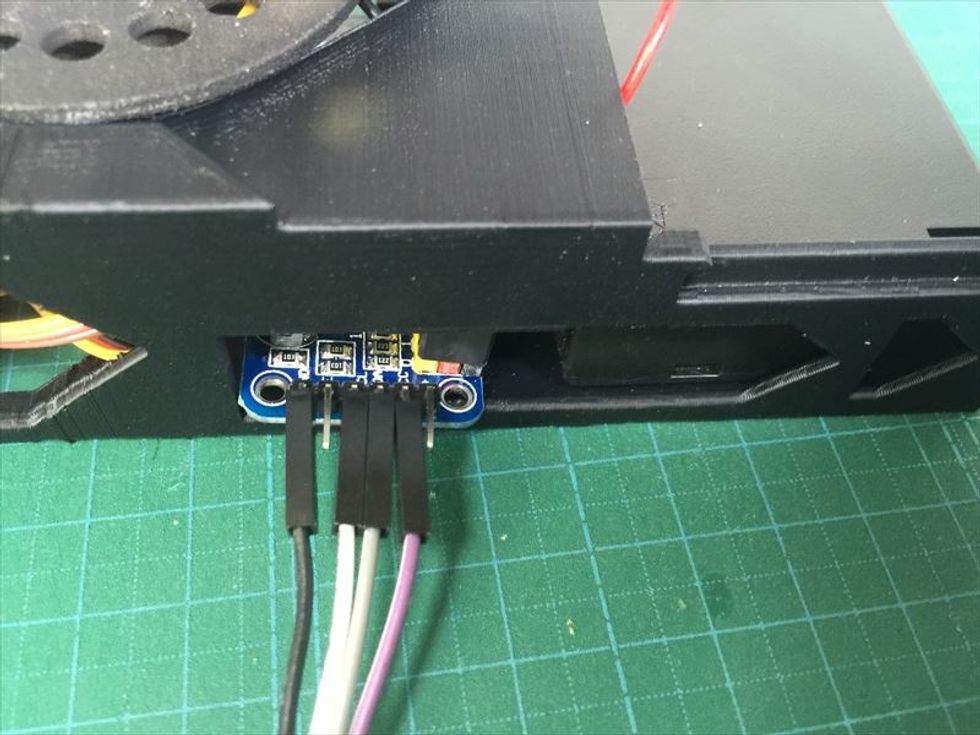
ケーブルをラズパイのGPIOに刺します。下段の左端から3V電源とI2Cが2本、1つ空けてGNDです。
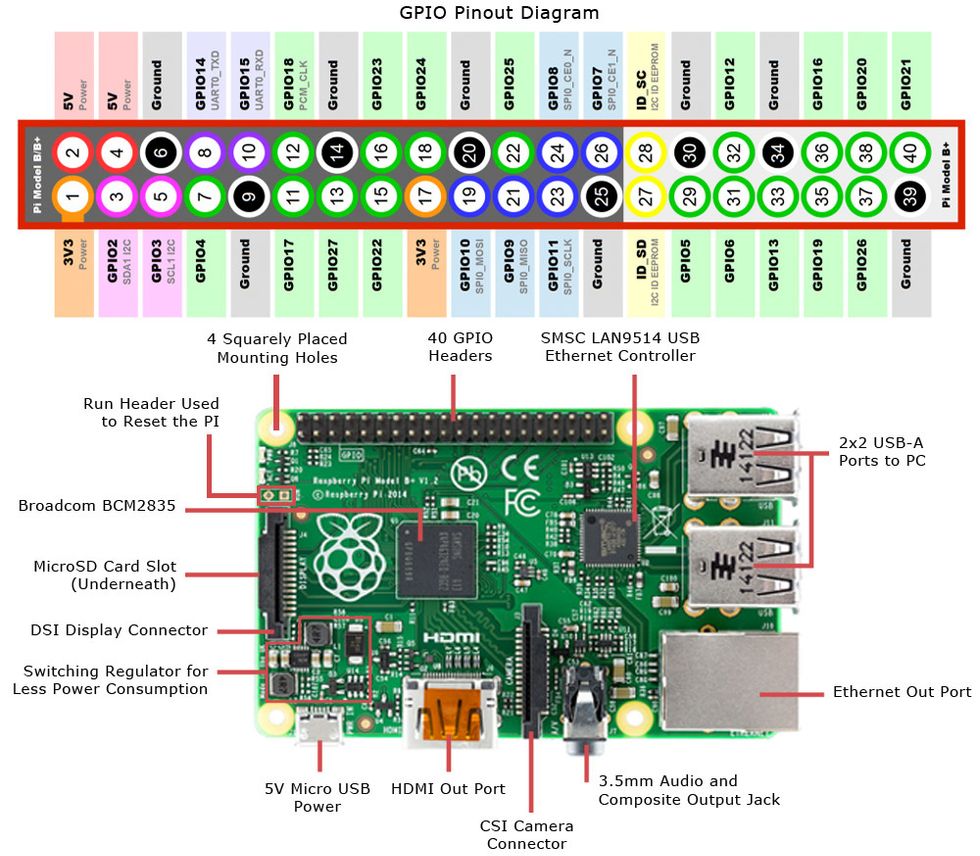
ラズパイのピン配置をご確認ください。
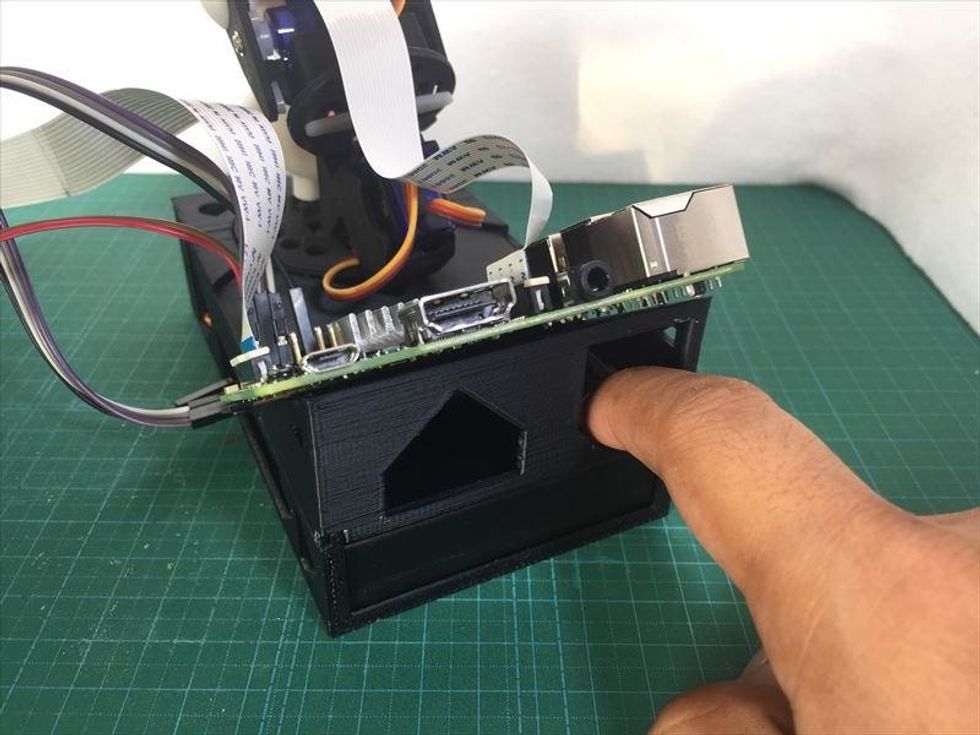
サーボを動かしたいときは、台座の背面の穴から指を入れて、電源スイッチを入れてください。
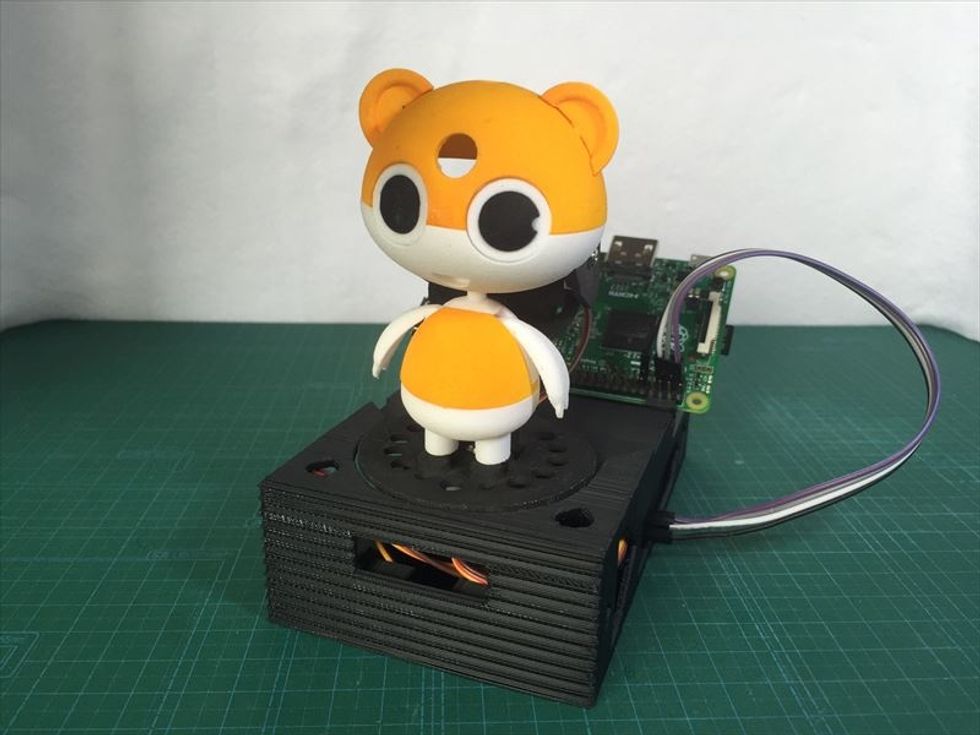
完成です。お疲れ様でした。