The Conversation (0)
Sign Up

道具はサーボを固定するプラスドライバー、電池ボックスのケーブルをねじ止めするマイナスドライバーが必要です。ラジオペンチもあると便利です。ハンダ付けはしないのでハンダゴテは不要です。

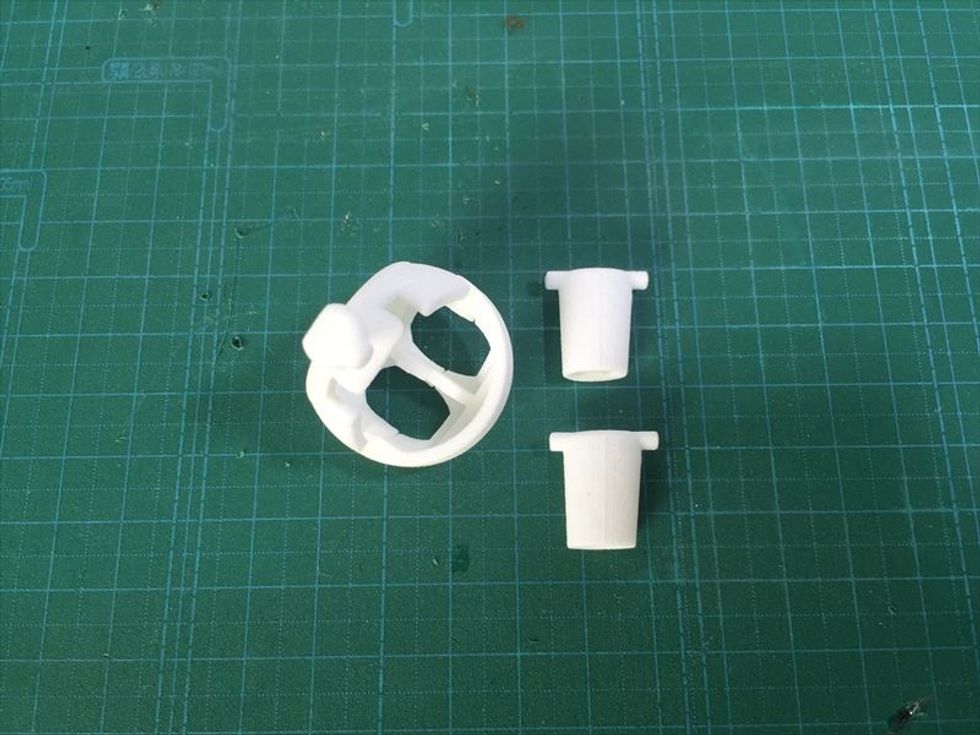
キットにはロボットのボディ(左側)のほか、ロボットを乗せて固定するためのパーツ(右側)が入ってます。

まずはロボットの頭部を作っていきましょう。
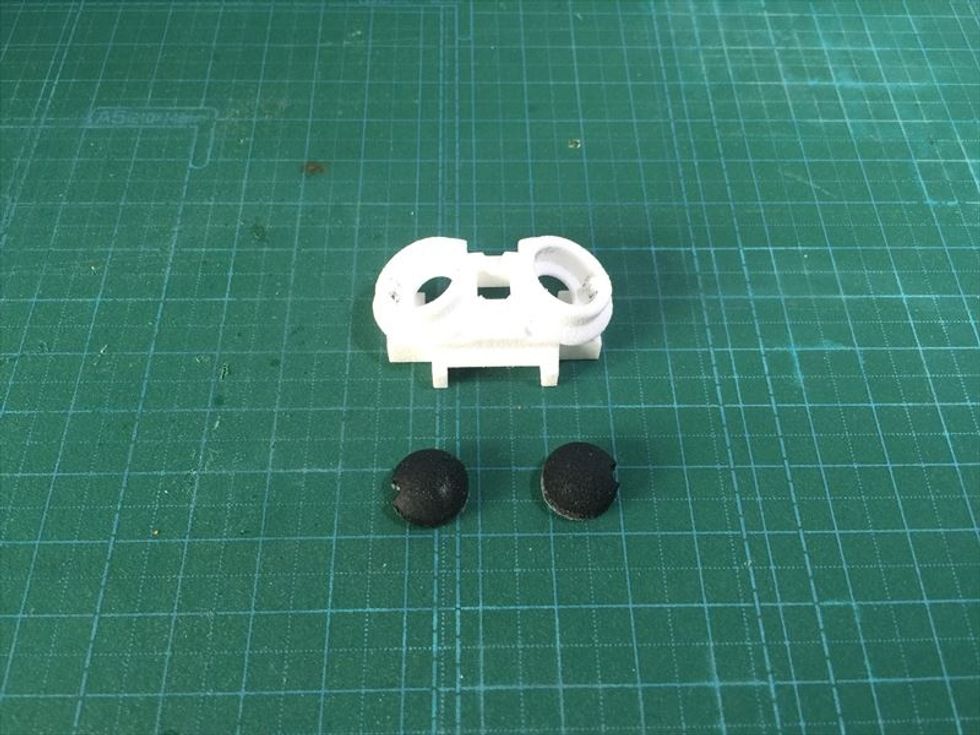
メガネ型パーツに目玉をはめ込みます。切り欠きの向きを合わせて、まっすぐ差し込まないと入らないのでちょっと難しいですよ。
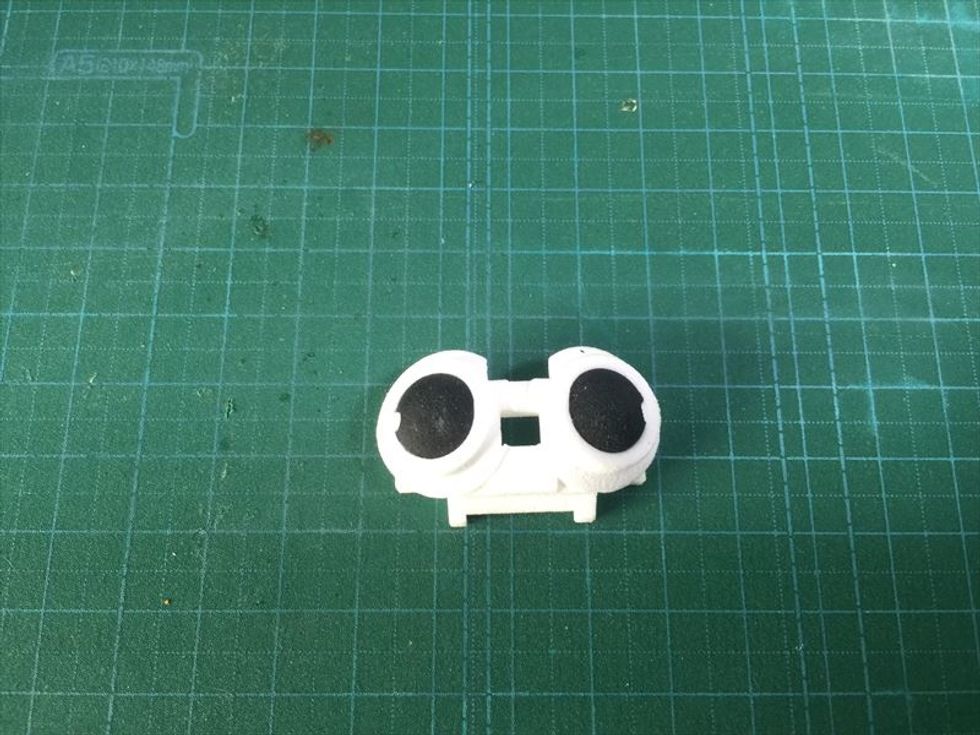
うまくハマりましたか?

白い顔のパーツにメガネをハメます。鼻のあたりでパチンとハマって固定されます。
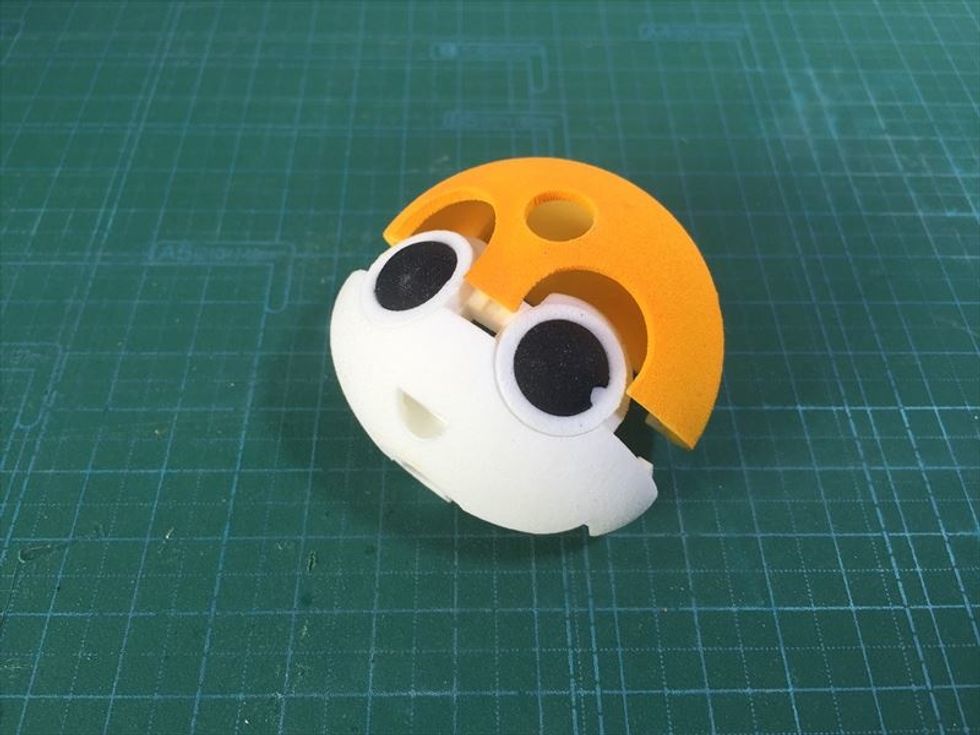
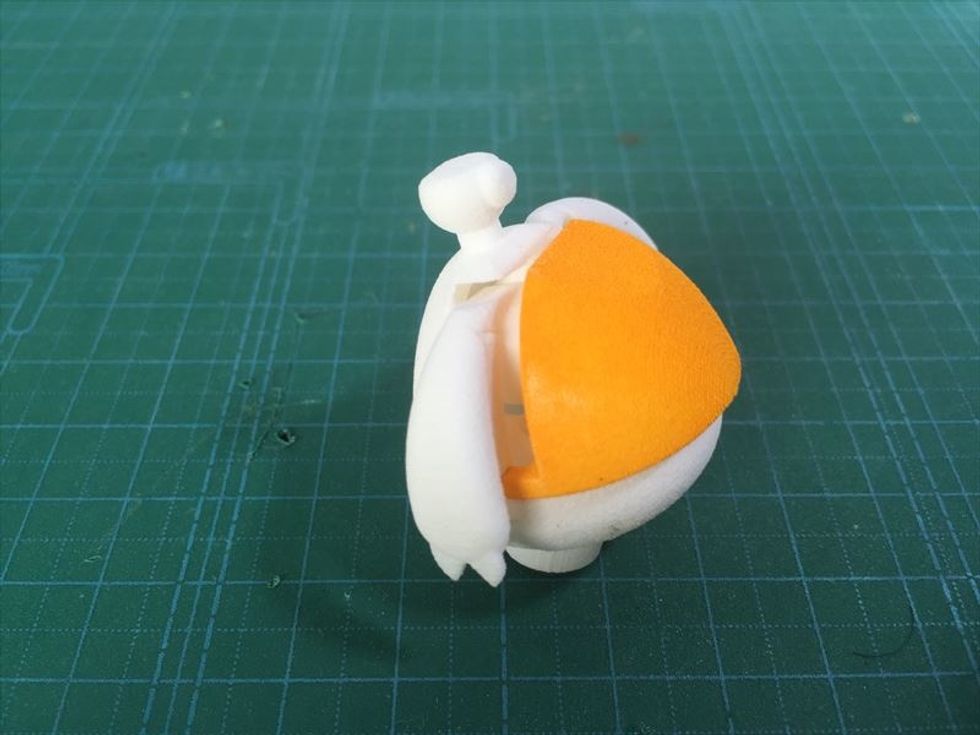
オレンジ色の頭のパーツをハメます。

きれいにハマりましたか?

右側の後頭部に黒いクシを差し込んで固定します。クシの内側に刻印されている矢印を上に向けてください。

頭部が完成しました。
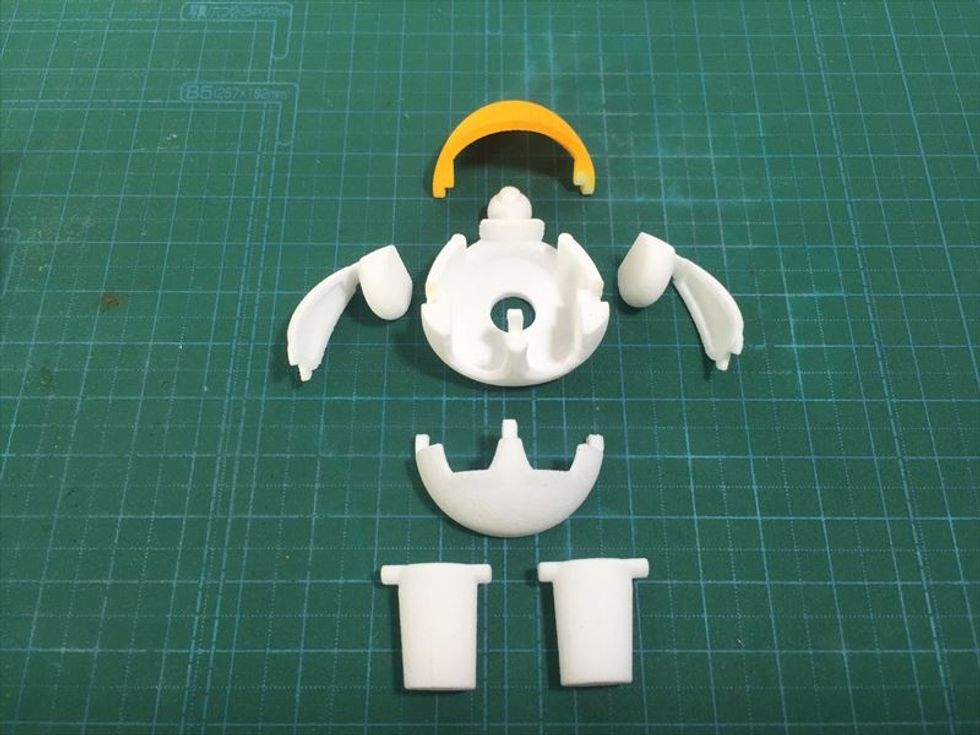
次に体を作りましょう。

背中パーツにお腹パーツを差し込みます。ちょっとキツいかもしれません。
足のパーツには前後があるので注意してください。斜めにカットされているほうが前です。(左右の違いはありません)

ボディの内側から足をストンと落とします。

ボディを床に寝せて、2つの腕パーツを乗せます。(2つの腕パーツは同じ形です。前後もありません)
オレンジ色の胸パーツでフタをします。

体が完成しました。

まず首を頭部の窪みに横から差し込みます。

体を正面に向けると、揺らしても体がハズれなくなります。

ロボットが完成しました。
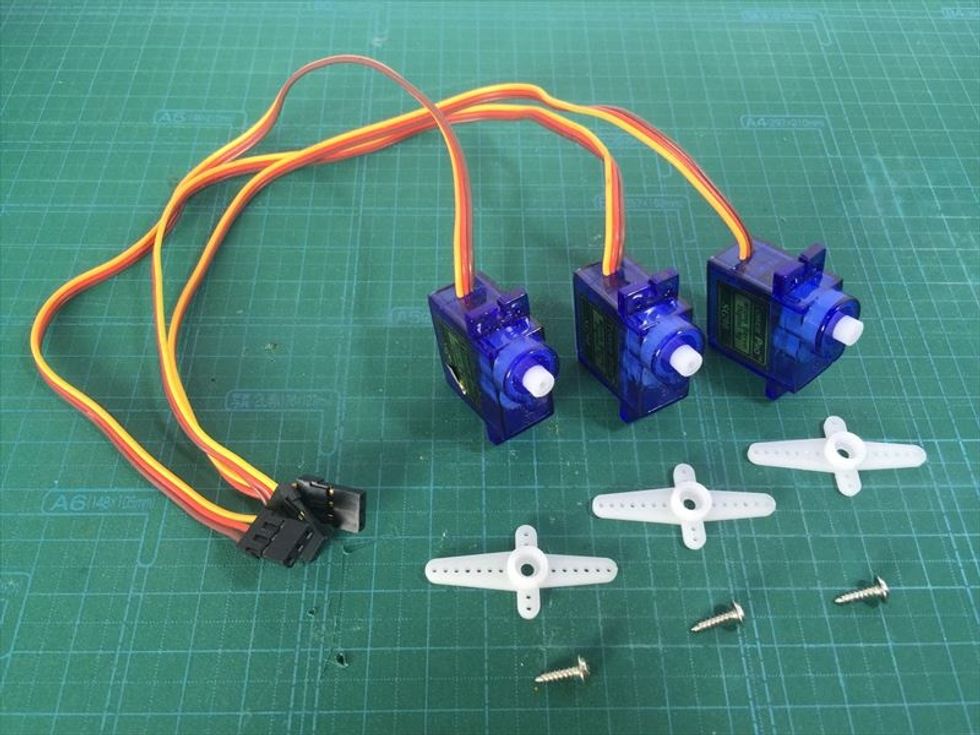
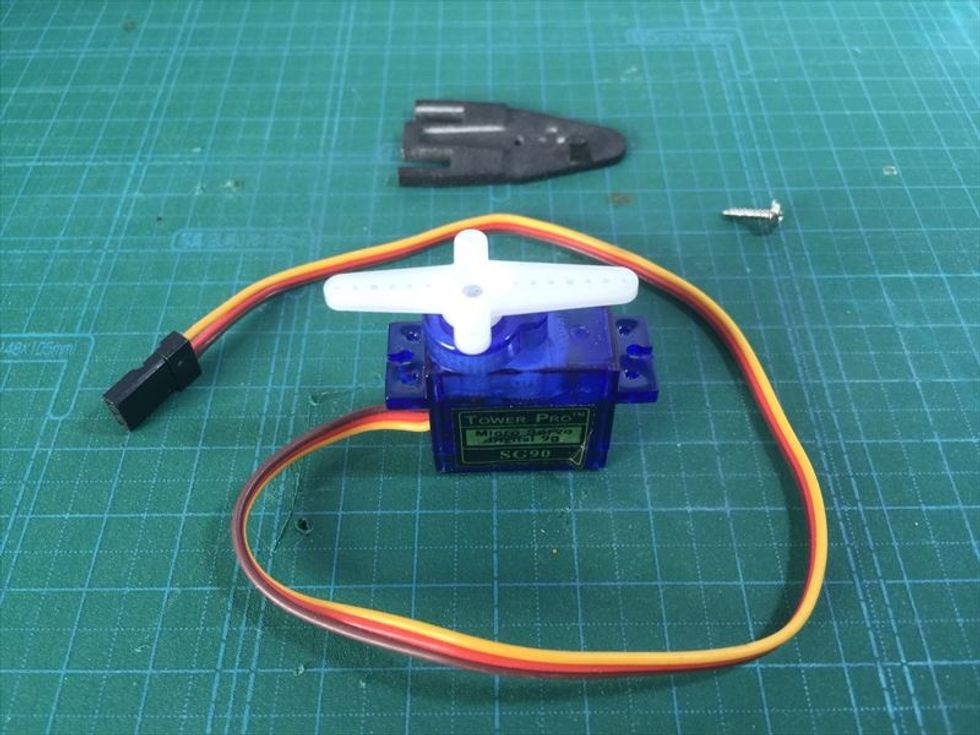
キットには3つのサーボが入っています。それぞれ3つのサーボホーン(白いパーツ)が入ってますが、使うのは十字型だけです。ネジも3本ずつ入ってますが、使うのは長いほうの1本だけです。
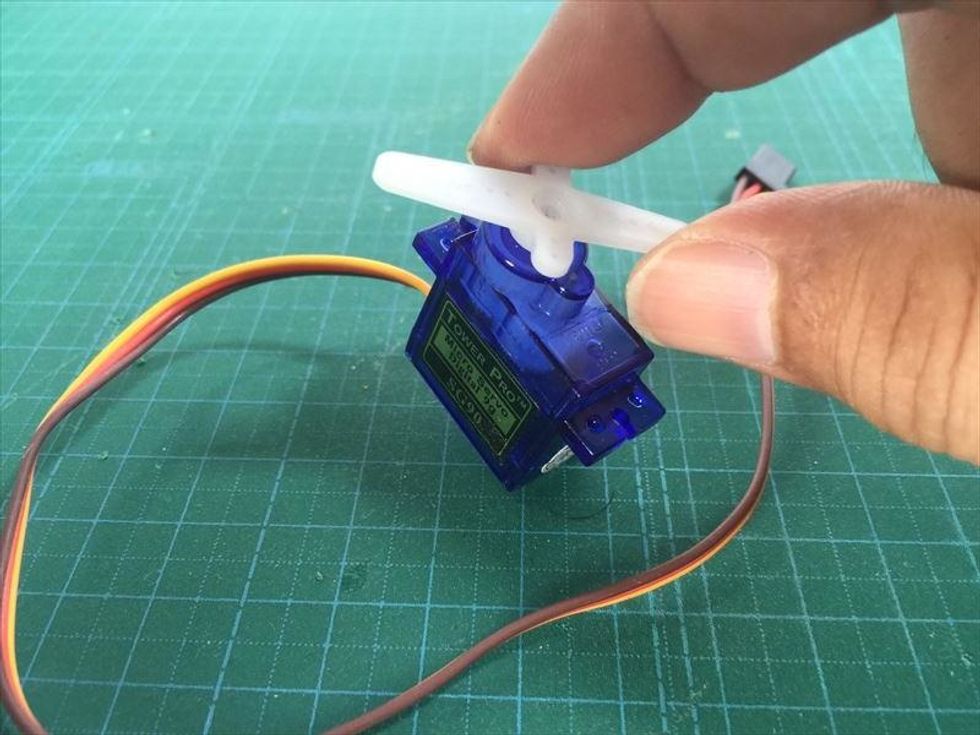
まずサーボをセンタリングします。本当はマイコンを使って正確にやるべきですが、ここでは簡易的に手動で行います。サーボホーンを適当な位置で嵌め、片方向にいっぱい回したあと90度戻します。
上の写真の通りにサーボホーンをハメてください。サーボホーンのいちばん長い腕を左側に向けます。そして黒い円形のジョイントパーツを用意してください。
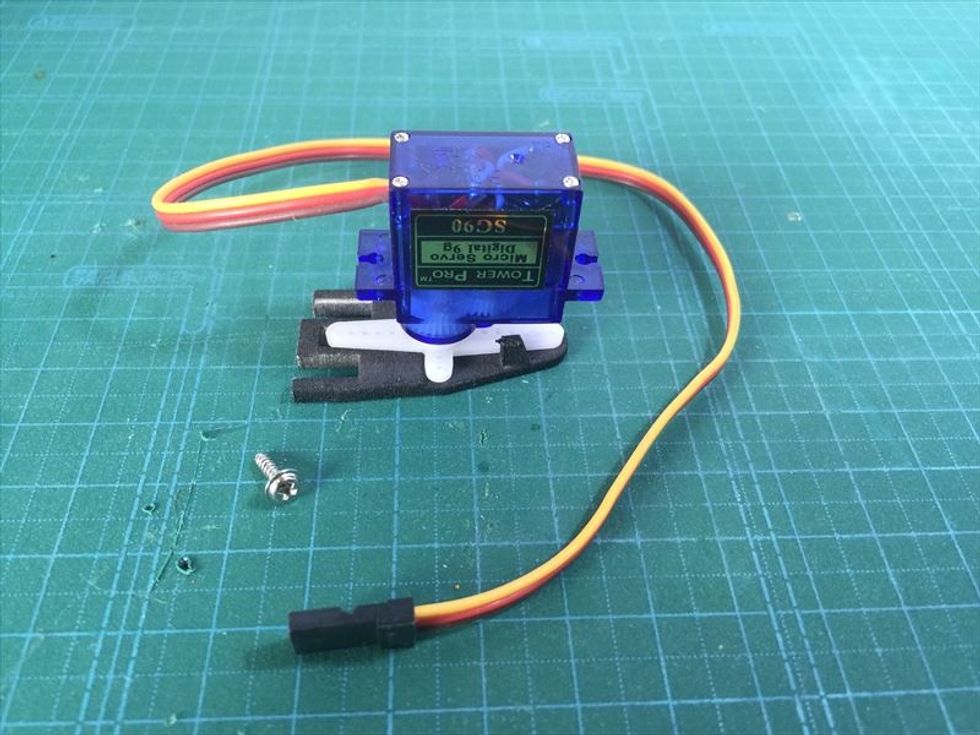
ジョイントパーツの裏側にサーボホーンを当ててください。ジョイントは切り欠きのある側が上です。サーボホーンは長い腕が右側です。
サーボとジョイントをネジで固定します。ジョイント内部は狭いのでネジを差し込むのが難しいと思います。指先でネジを押さえたままドライバーを突っ込むとよいでしょう。
こんな感じにできたでしょうか?
2つめのサーボと左側のクシ型パーツを用意してください。上の写真を見ながら、サーボホーンをとりつけてください。長い腕が右側です。
サーボをひっくり返してサーボホーンをクシ型パーツに合わせます。
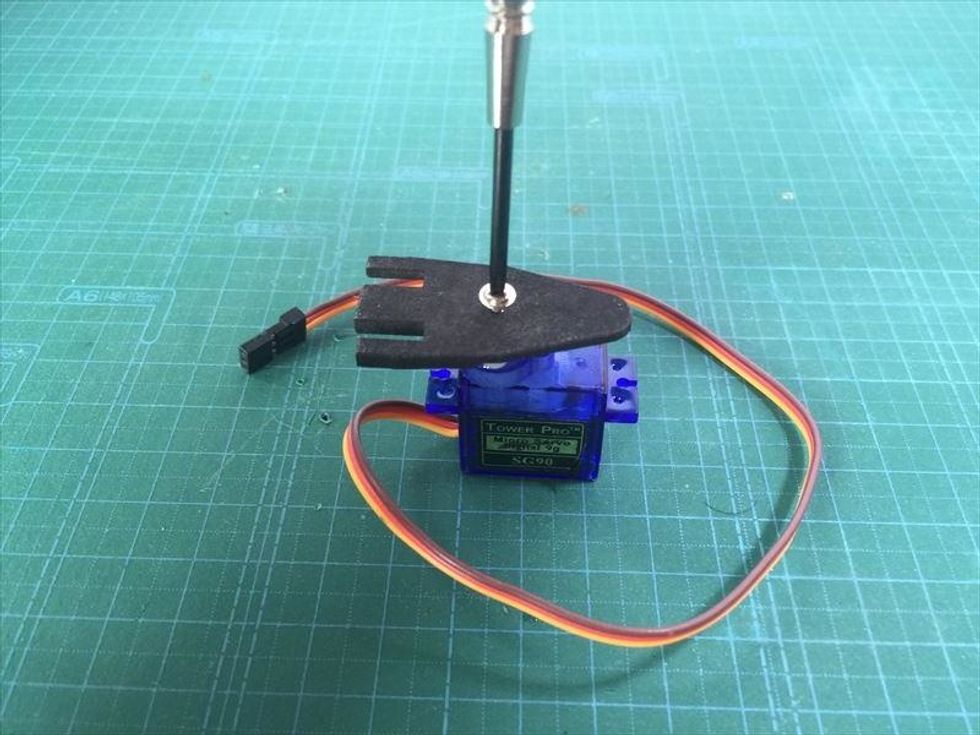
ネジでサーボとクシ型パーツを固定します。
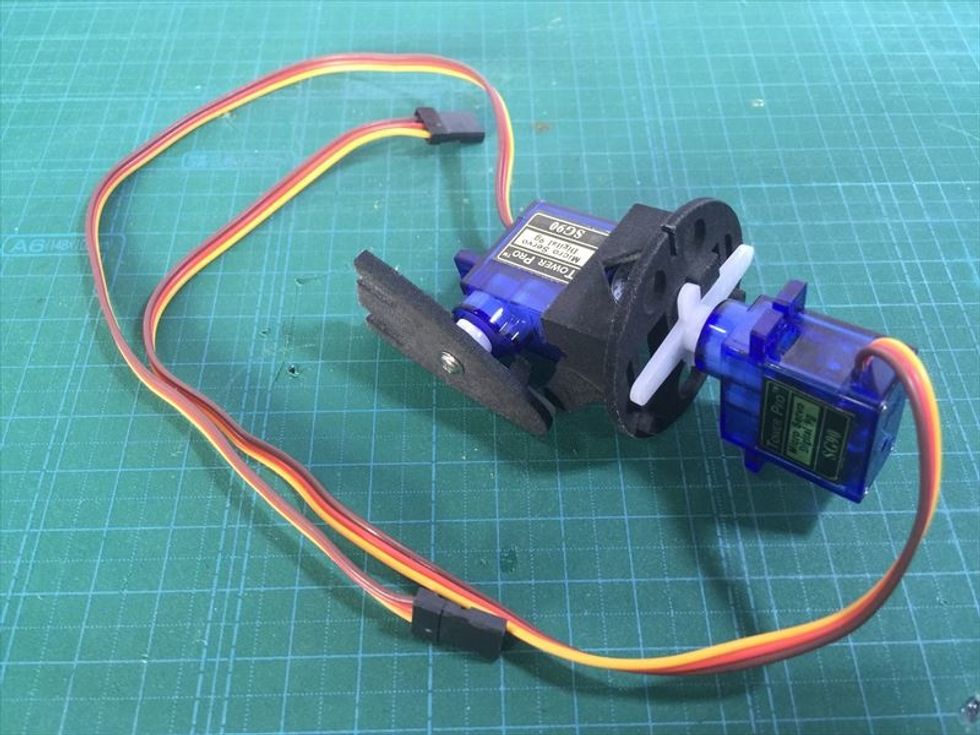
クシ型パーツのついたサーボをジョイントに差し込んでください。
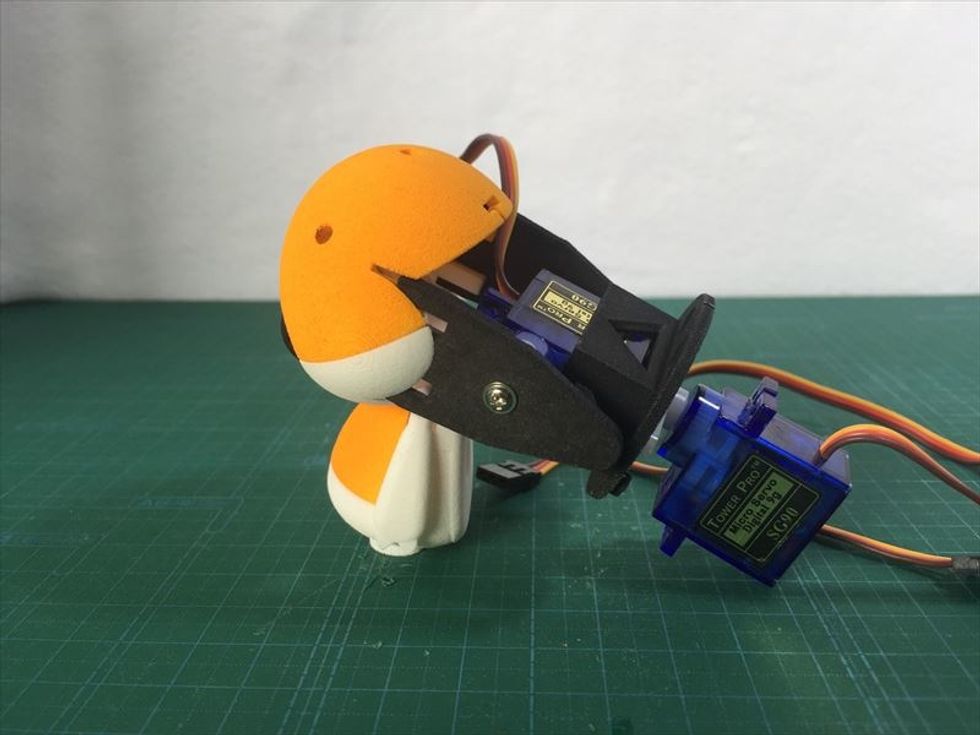
左側のクシ型パーツをロボットの後頭部に差し込んでください。

ちょっと不安定ですが、こんな感じでお座りさせましょう。
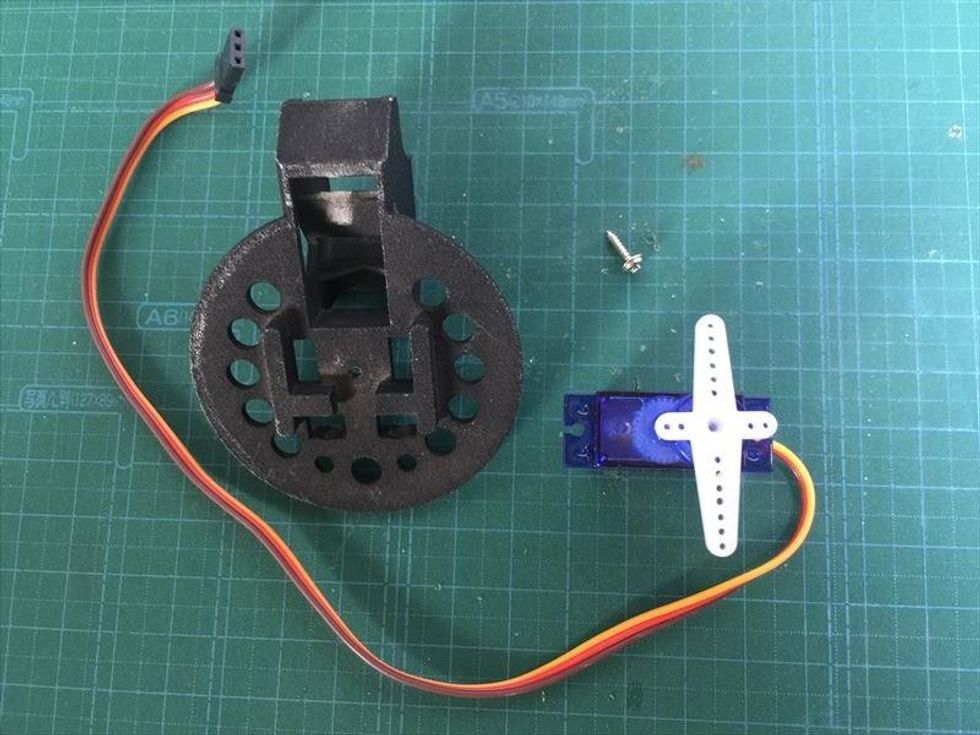
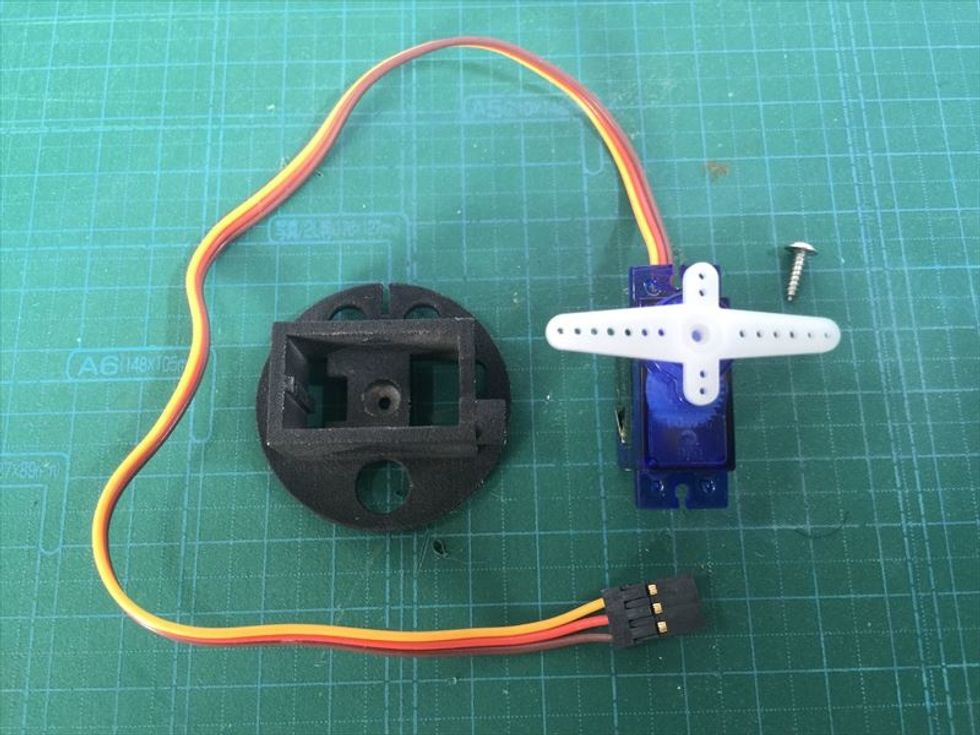
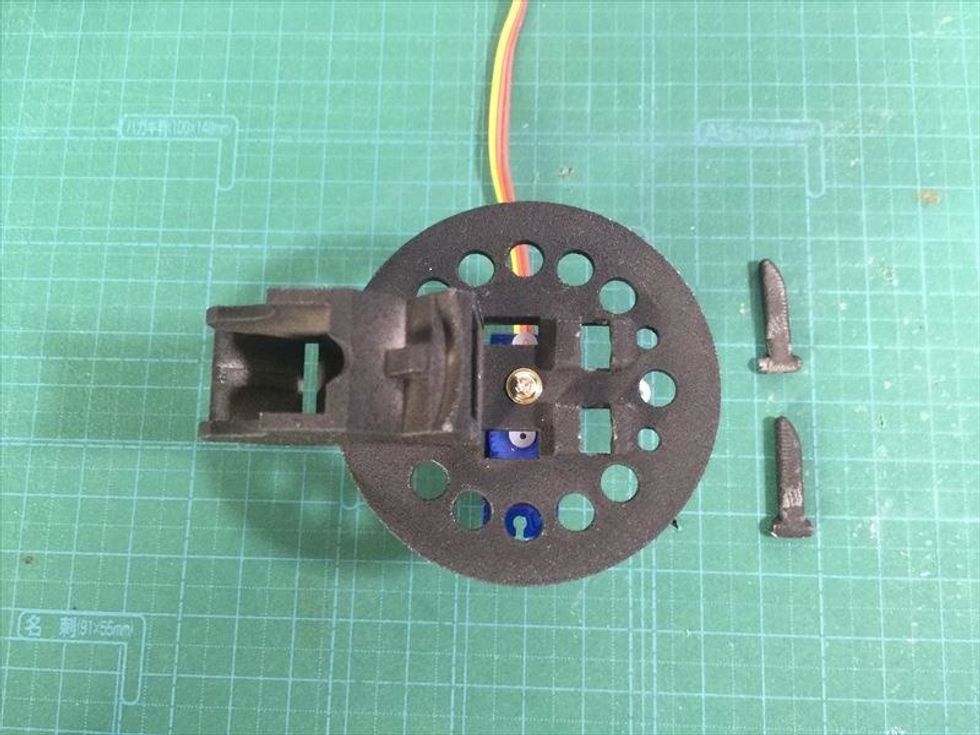
3つめのサーボと円盤型パーツを用意してください。上の写真を見ながらサーボホーンをはめてください。長い腕を下に向けます。
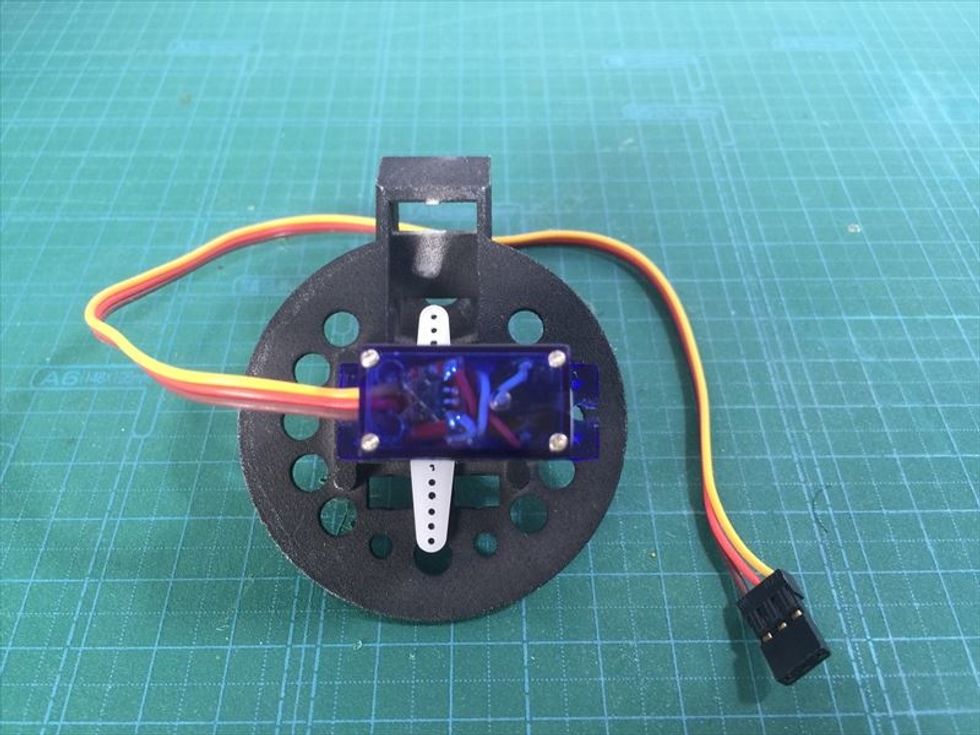
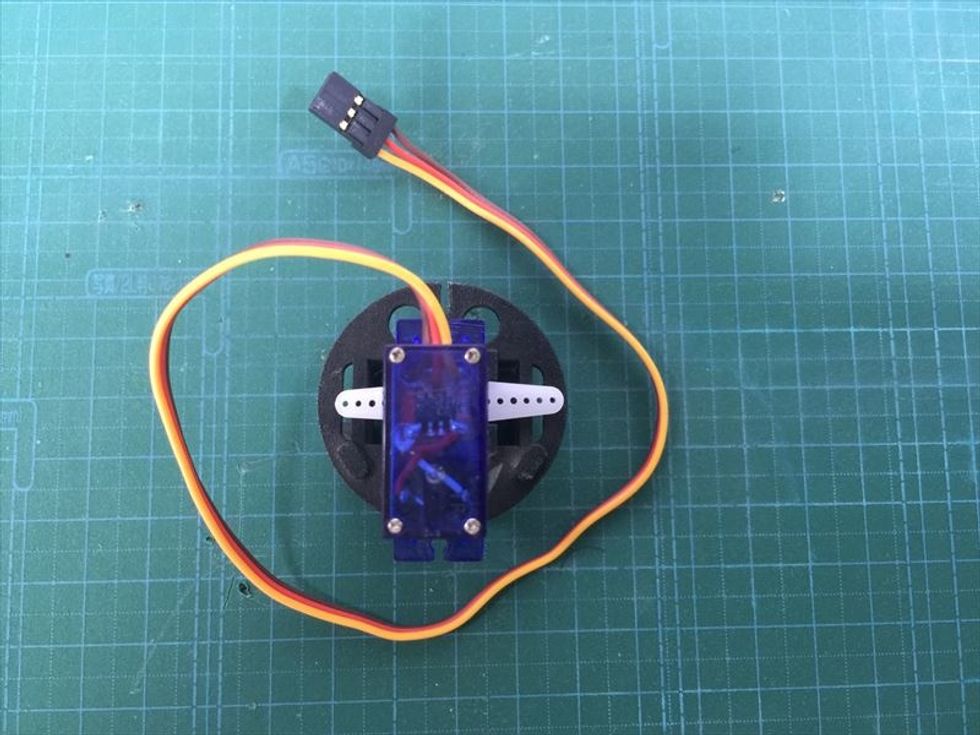
円盤型パーツの裏にサーボを当てます。サーボホーンの長い腕を下に向けてください。
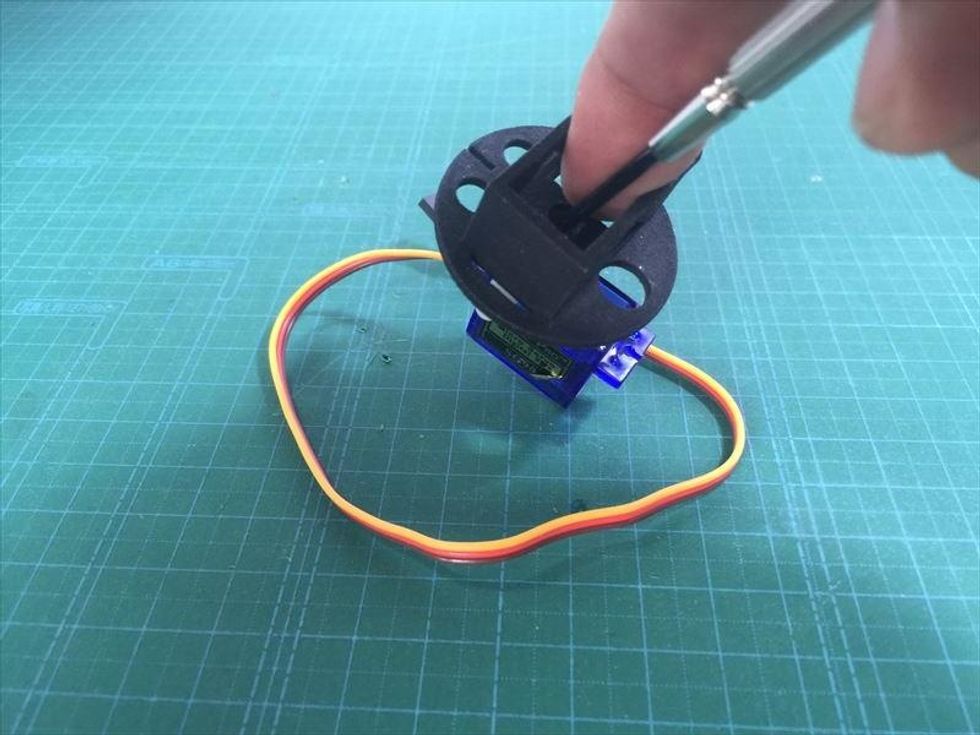
ネジで固定します。
2つの足首パーツを用意してください。足首パーツには向きがあります。斜めにカットされているほうが前になります。
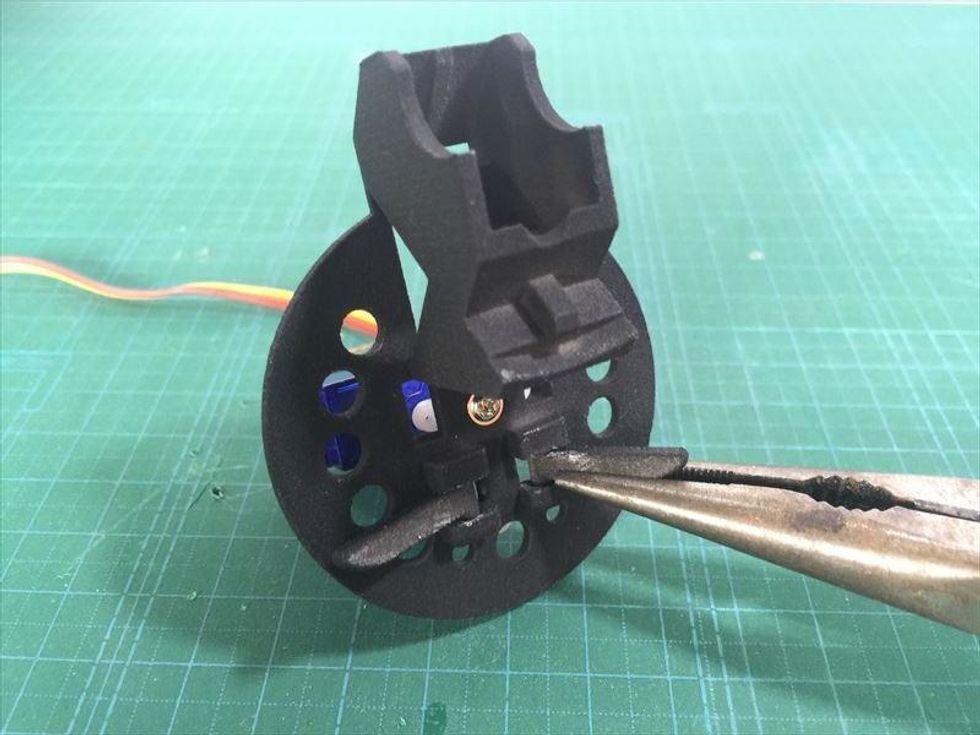
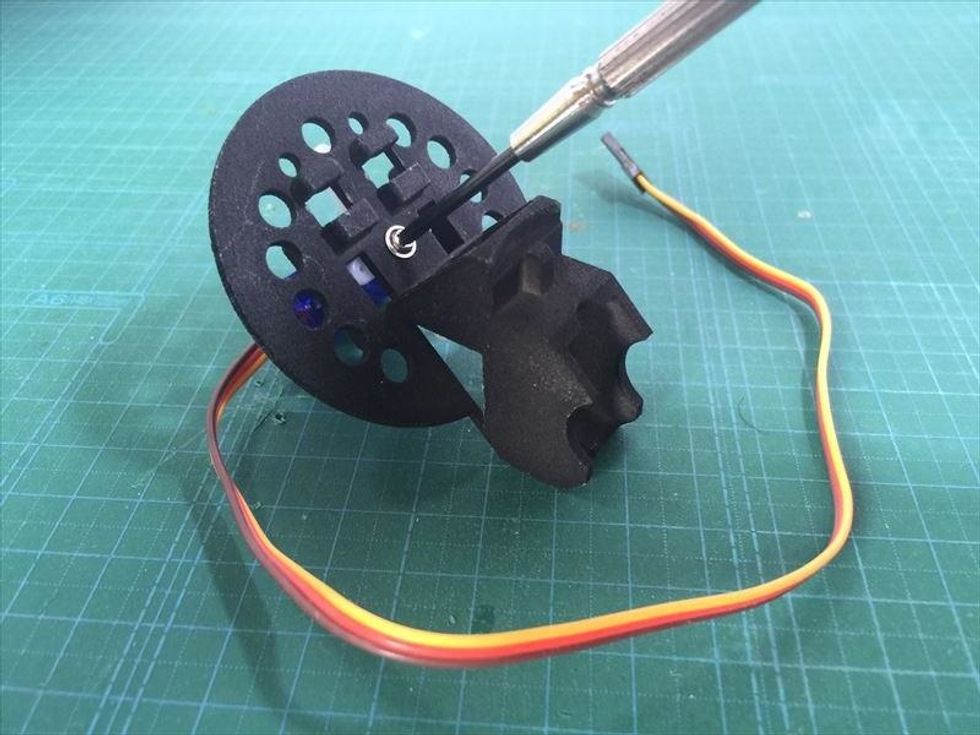
足首パーツを円盤型パーツにとりつけます。指の力が弱いひとはペンチを使ってください。回転させながらネジるようにハメるのがコツです。
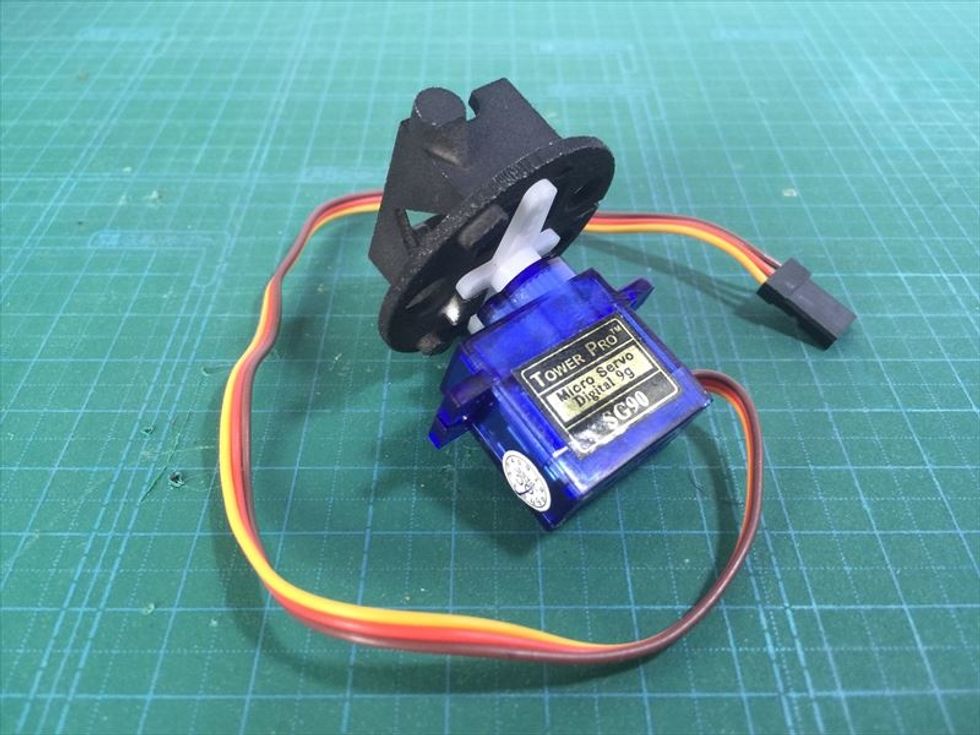
足首パーツがとりつけられました。
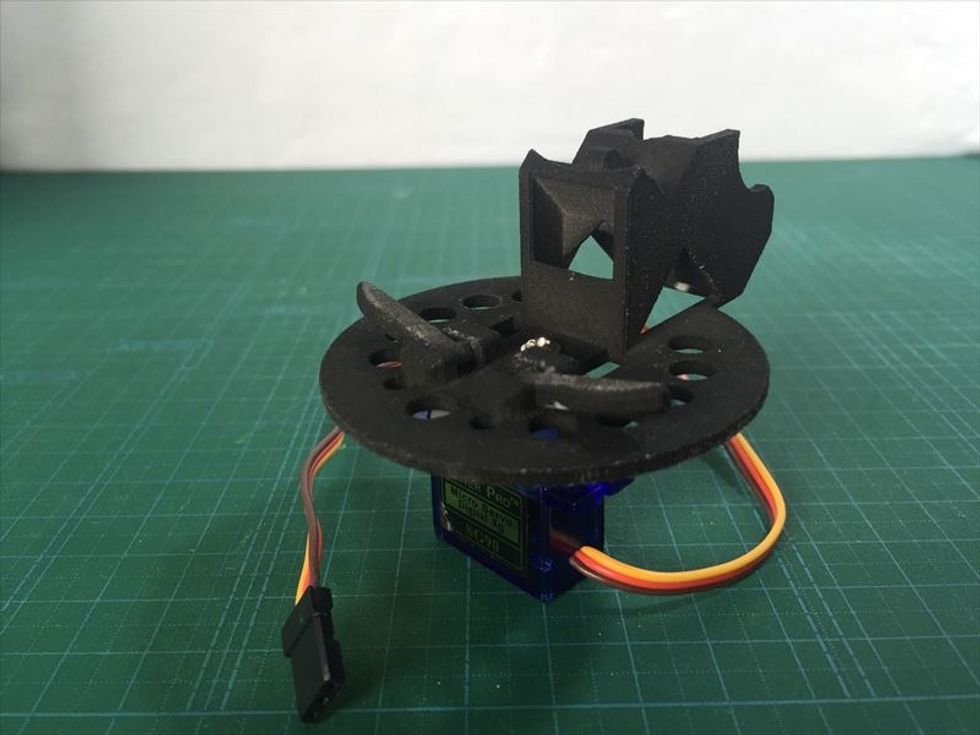
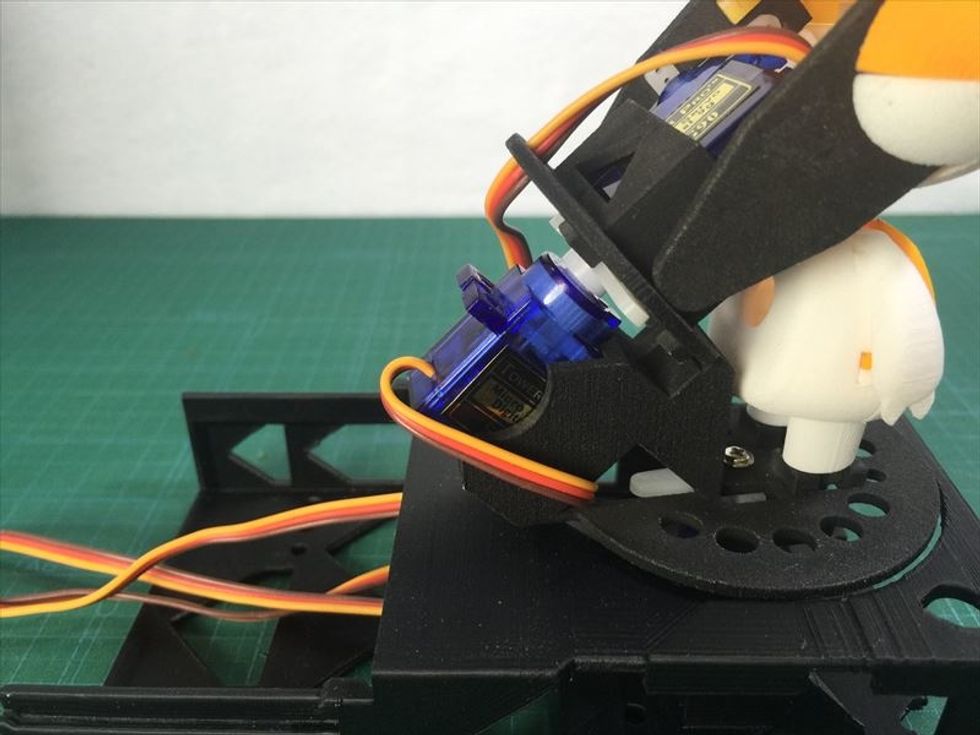
円盤型パーツのサーボを台座にハメます。ケーブルの向きに注意してください。
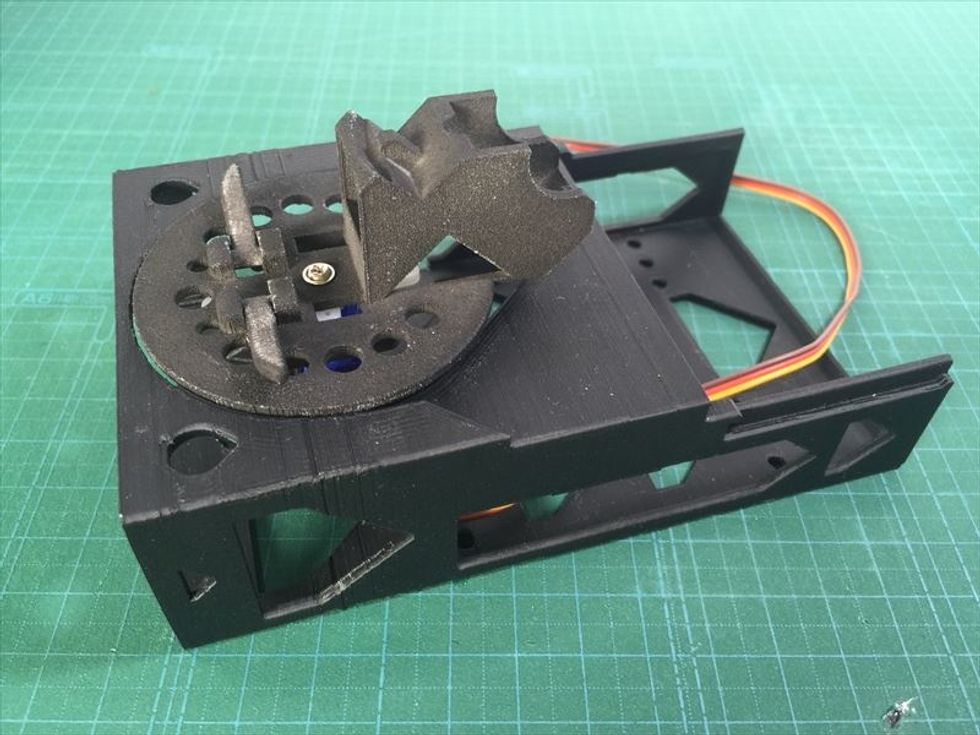
円盤型パーツが台座に乗りました。
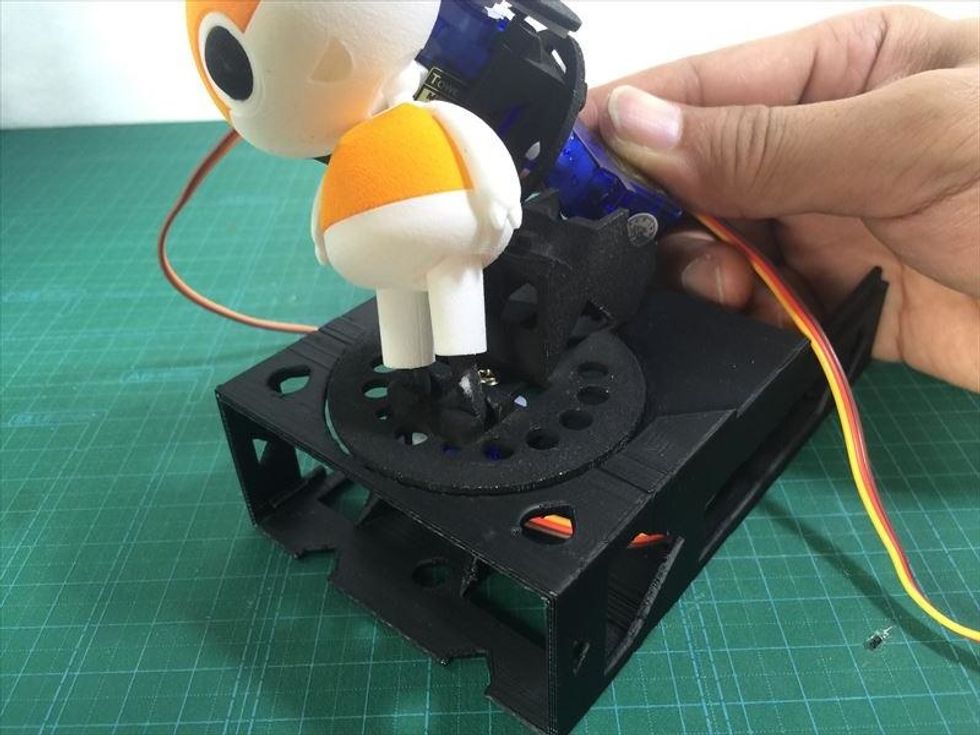
ロボットの足の穴に、足首パーツを差し込みます。
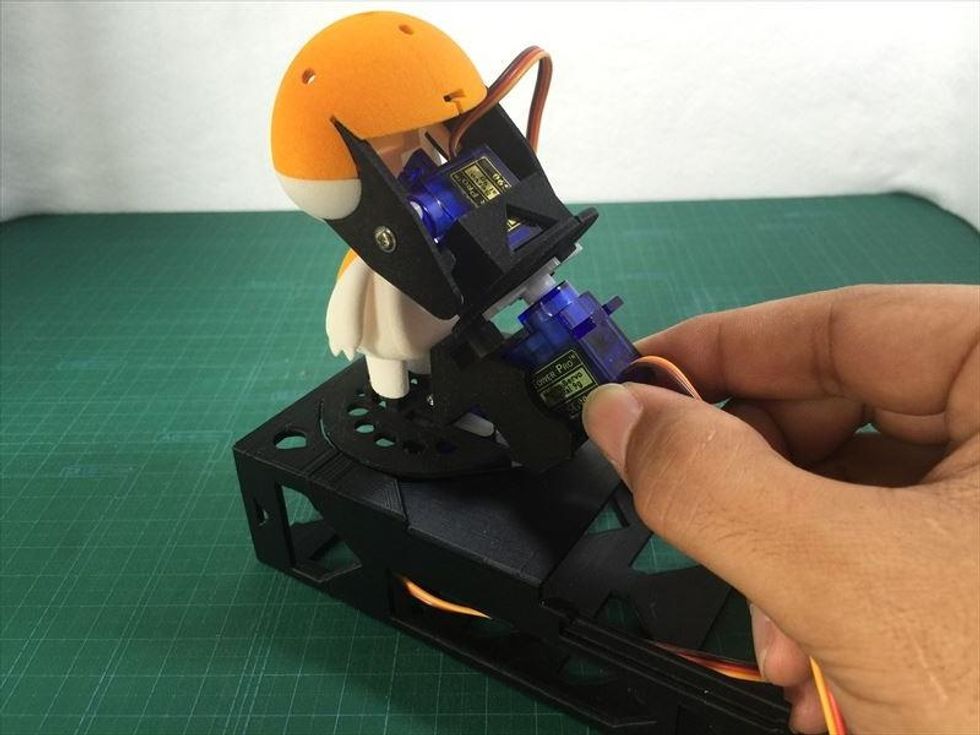
ジョイントのサーボを円盤型パーツに差し込みます。
サーボのケーブルが邪魔にならないように、ジョイントの切り欠きに差し込みましょう。
サーボのケーブルは円盤型パーツの三角形の穴に差し込んでください。

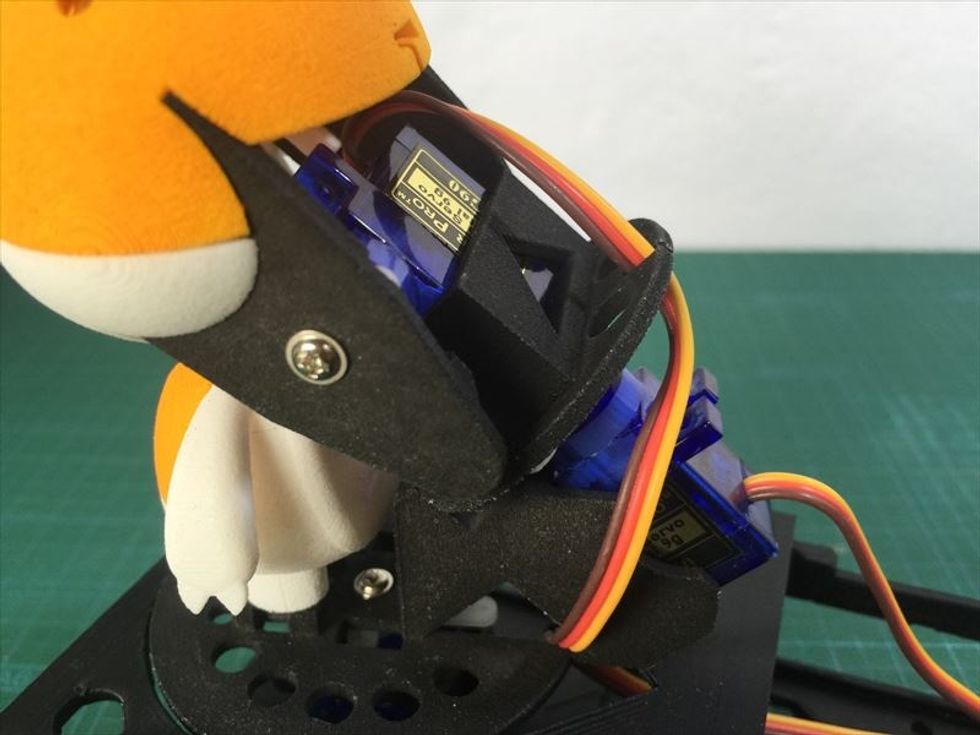
組み立て完了です!

お好みに合わせて耳パーツもつけてあげてください。

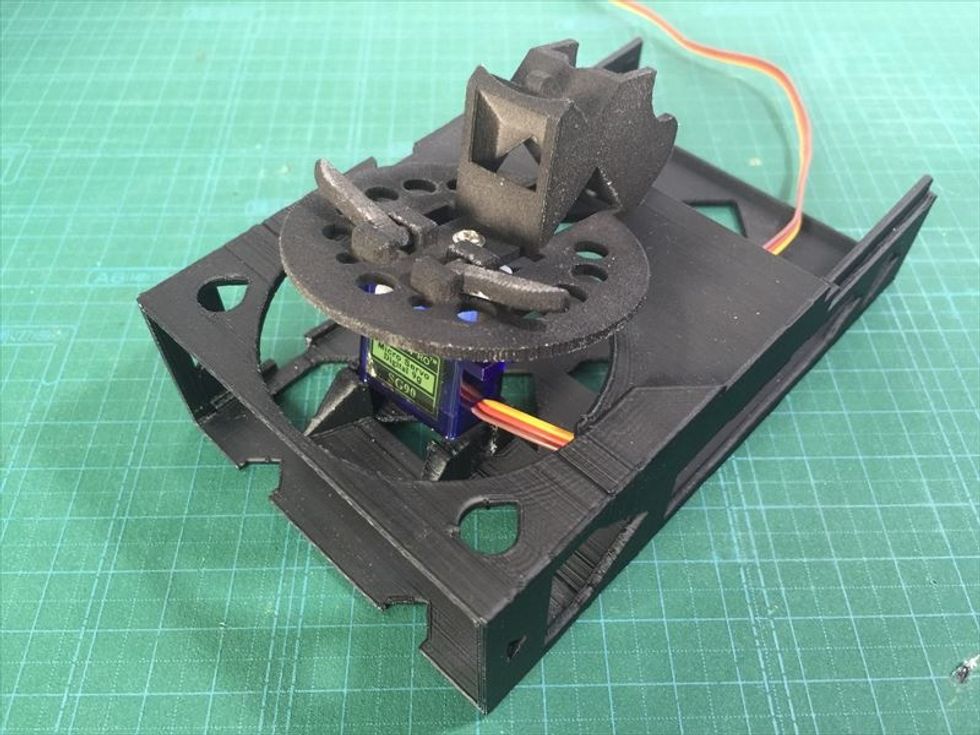
必要に応じて台座のパーツも取り付けてください。

以上で完了です。お疲れ様でした。