The Conversation (0)
Sign Up
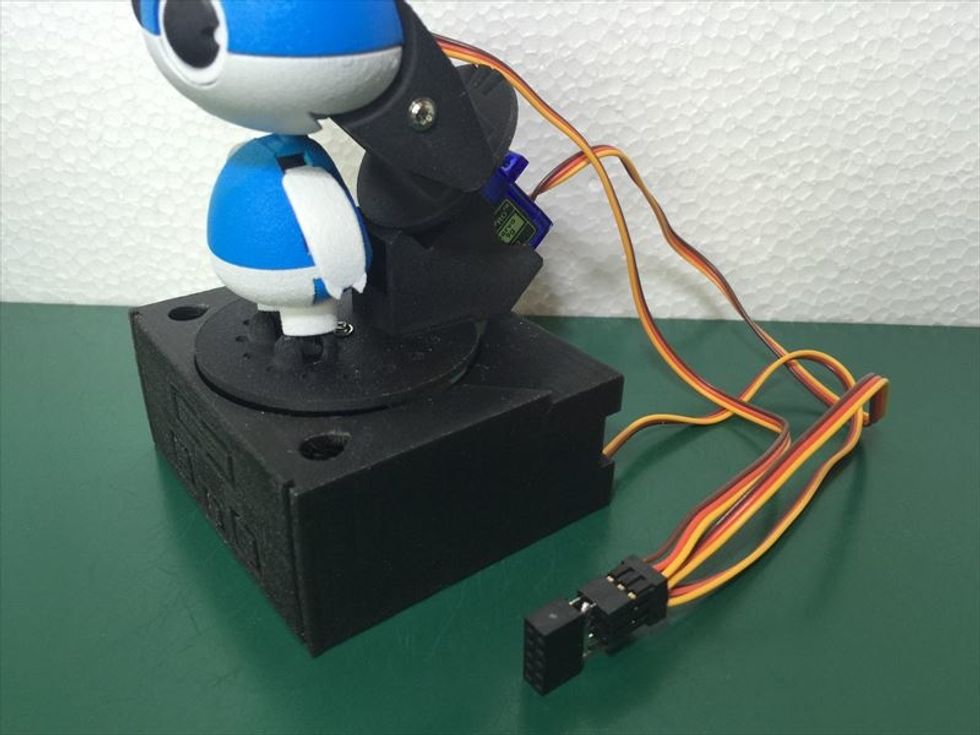
ベゼリーの3つのサーボがソケットに接続されていることを確認してください。サーボのケーブルは茶色がGND(マイナス)、赤が電源(プラス)、黄色が信号線です。黄色はソケットには刺しません。
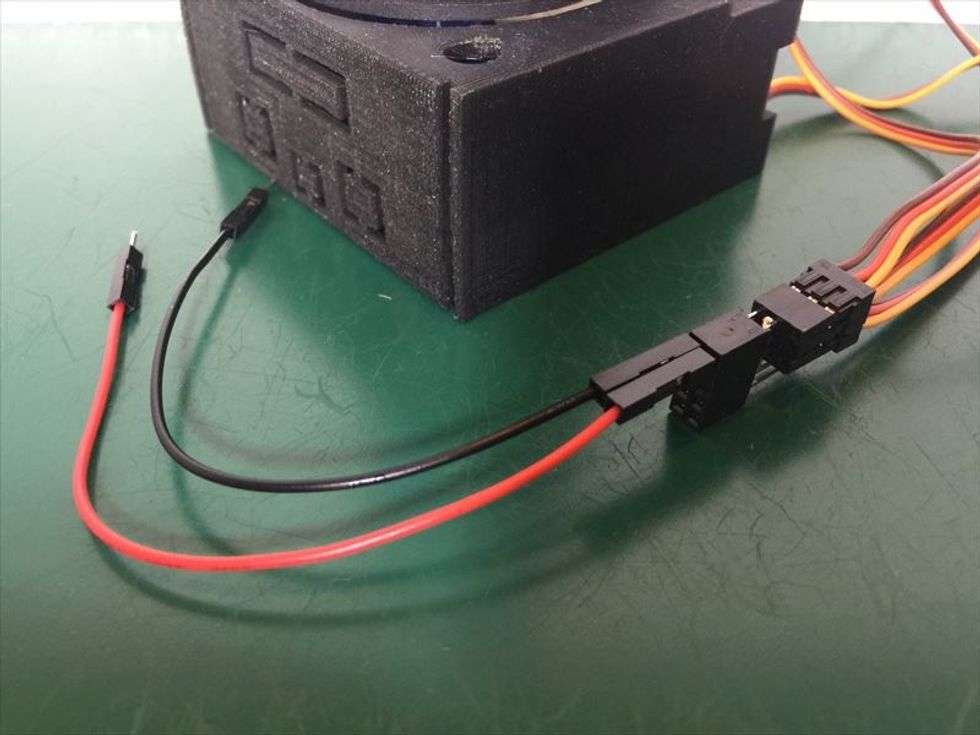
サーボの茶色ケーブルが刺さっている側に黒ケーブル、赤ケーブルが刺さっている側に赤ケーブルを指します。
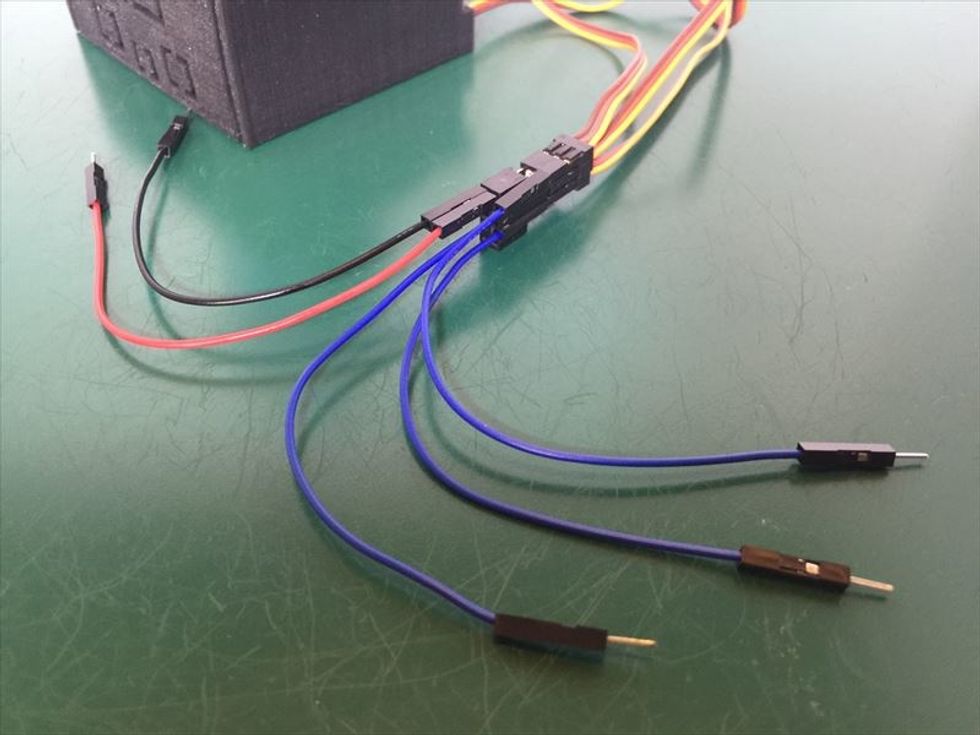
黄色い信号線3本それぞれに、青いケーブルをつなぎます。
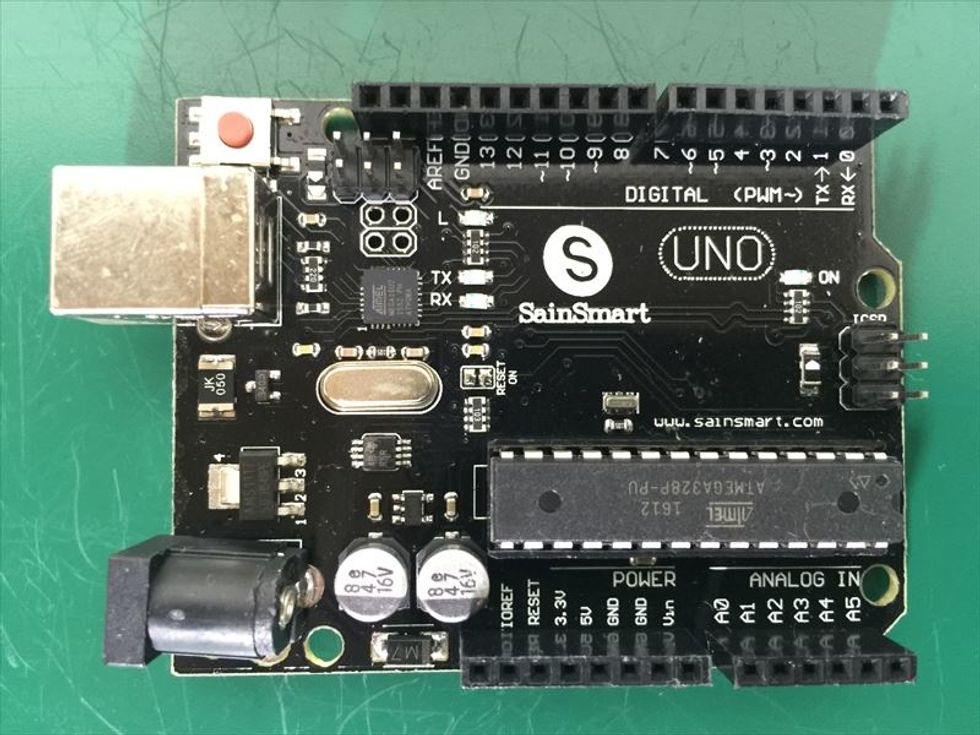
SainSmart UNO を袋から出します。SainSmart社が発売しているArduino UNOの互換機です。
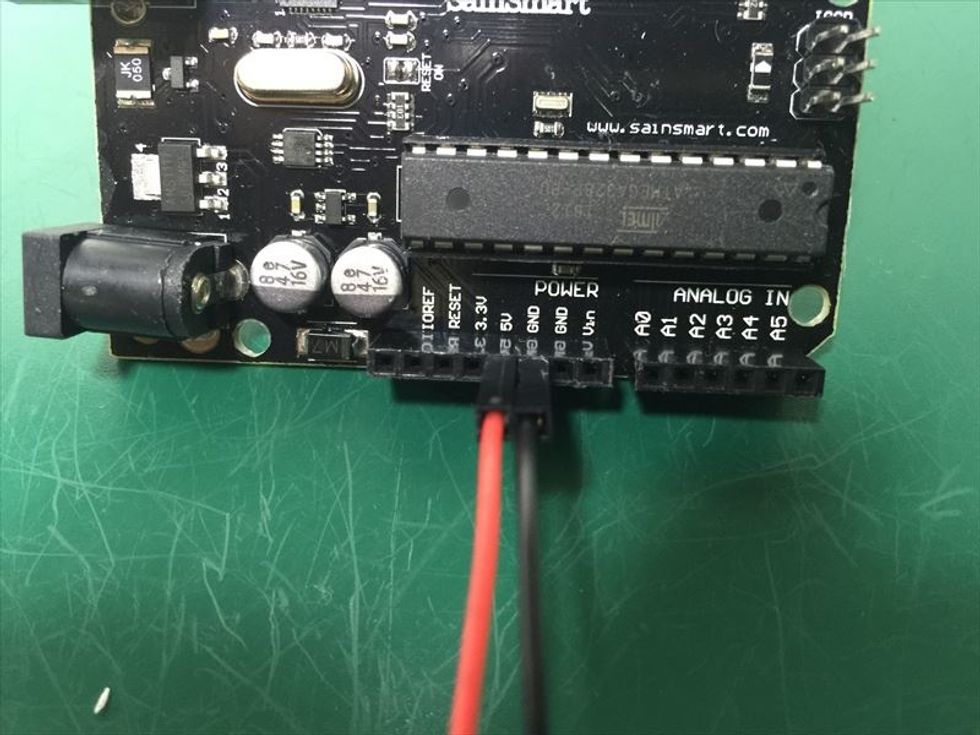
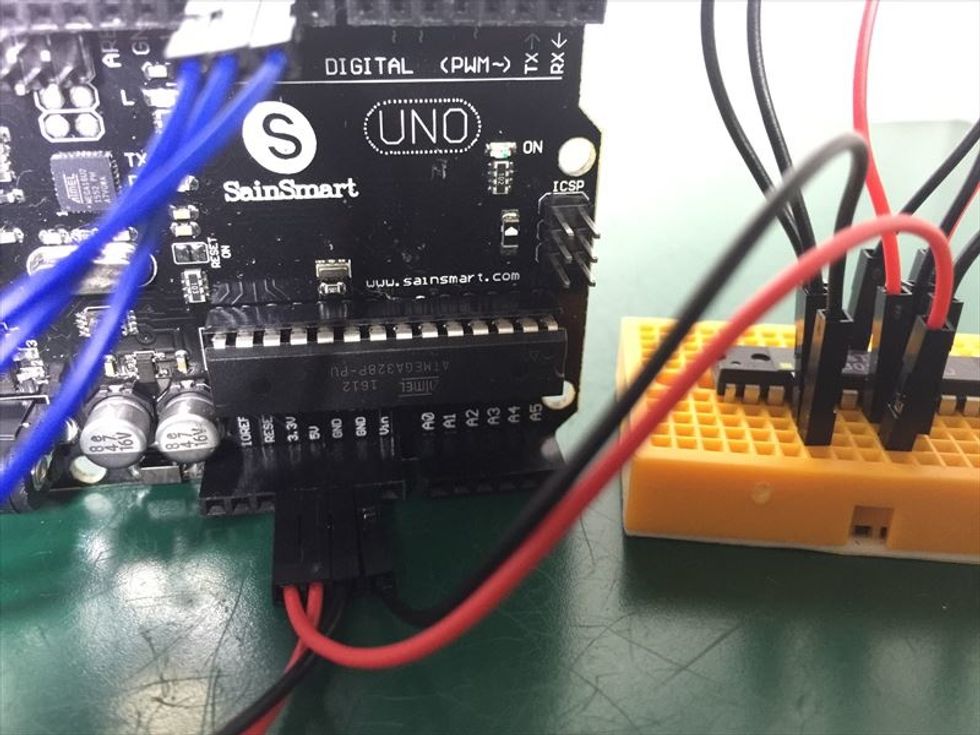
「5V」に赤ケーブル、「GND」に黒ケーブルを刺します。GNDと書かれたソケットは複数ありますが、どれも同じです。
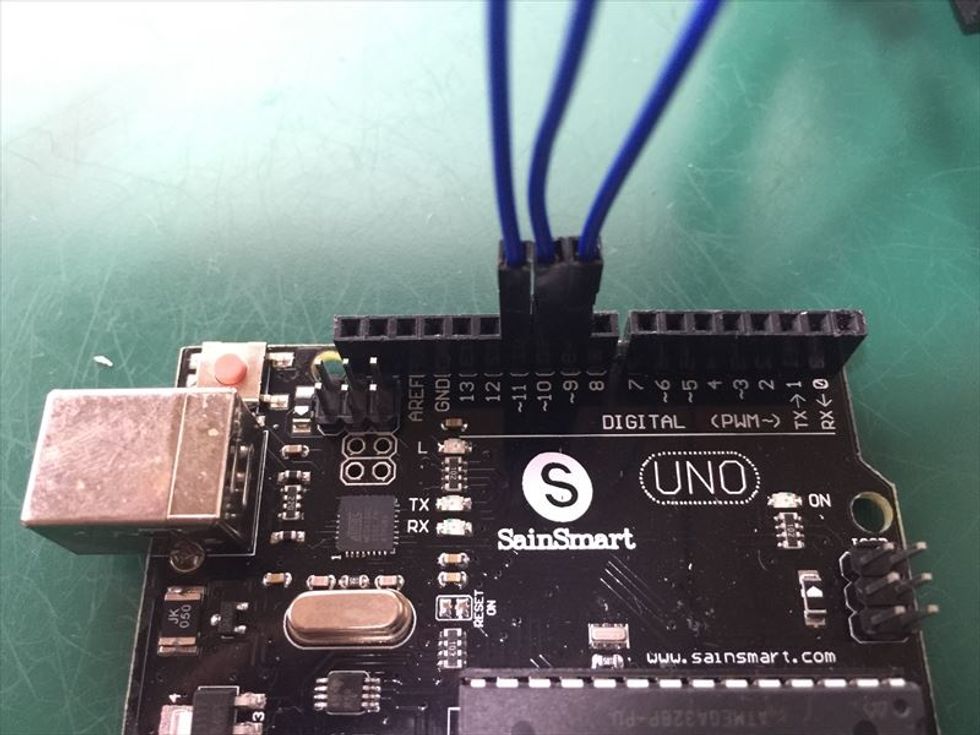
サーボをコントロールするため、青いケーブルを「~9」「~10」「~11」に刺します。首のサーボが「9」、スタンドのサーボが「10」、台座のサーボが「11」に刺さるようにします。
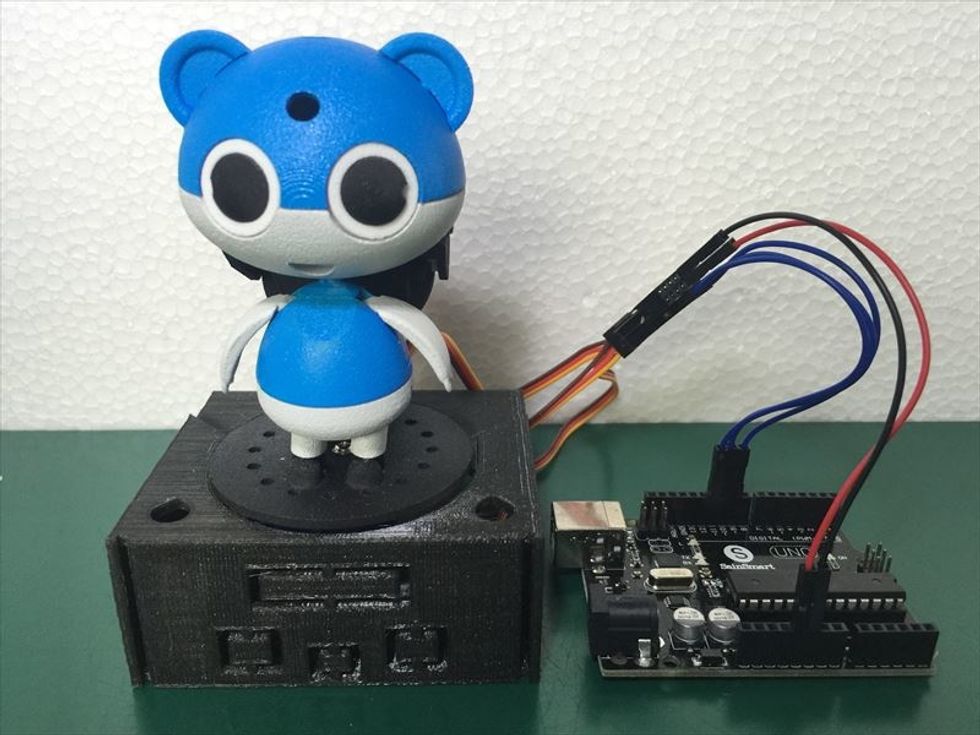
これでベゼリーとUNOがつながりました。UNOにはすでにサンプルプログラムが入っているので、電源ケーブルを刺すと、動き出すはずです。
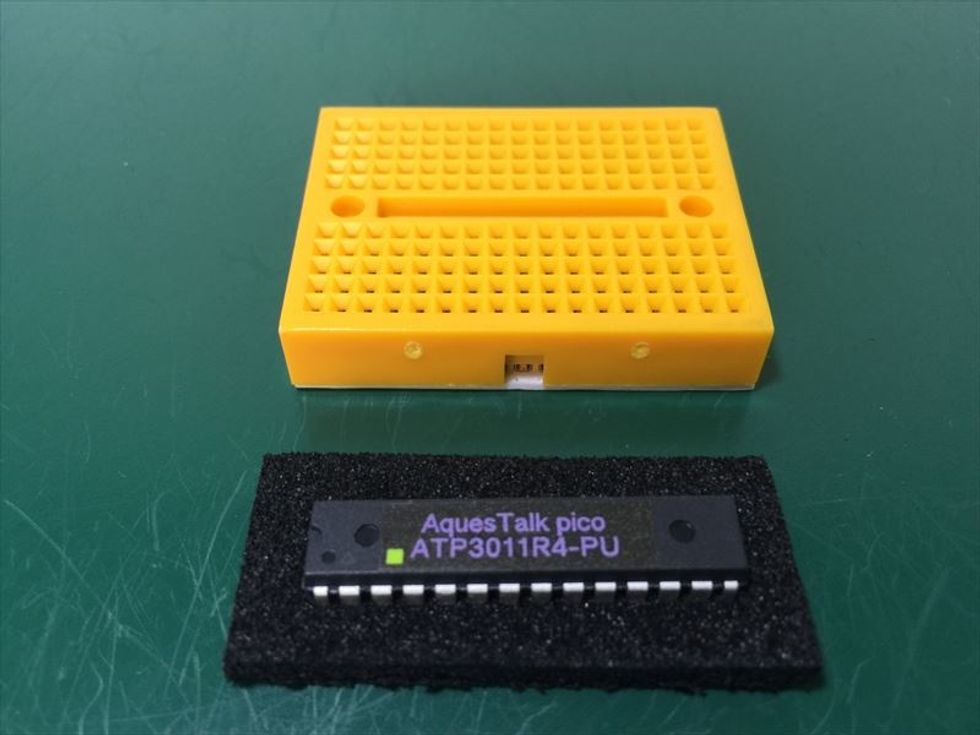
次にAques Talk Pico LSIとブレッドボードを用意します。

AquesTalk Pico LSIをブレッドボードの中央に刺します。すべての足がちゃんと穴に入るように刺し込むのは、ちょっと難しいです。
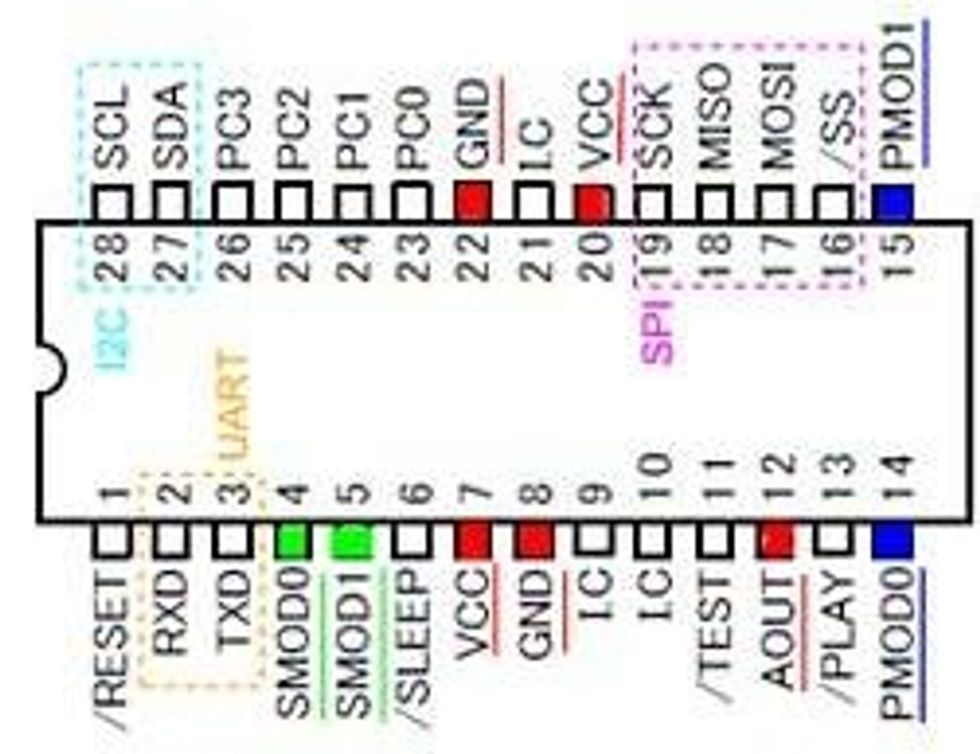
これがAquesTalk Pico LSIのピン配置です。マイコンと通信する方法はいろいろありますが、今回はI2C方式を説明します。
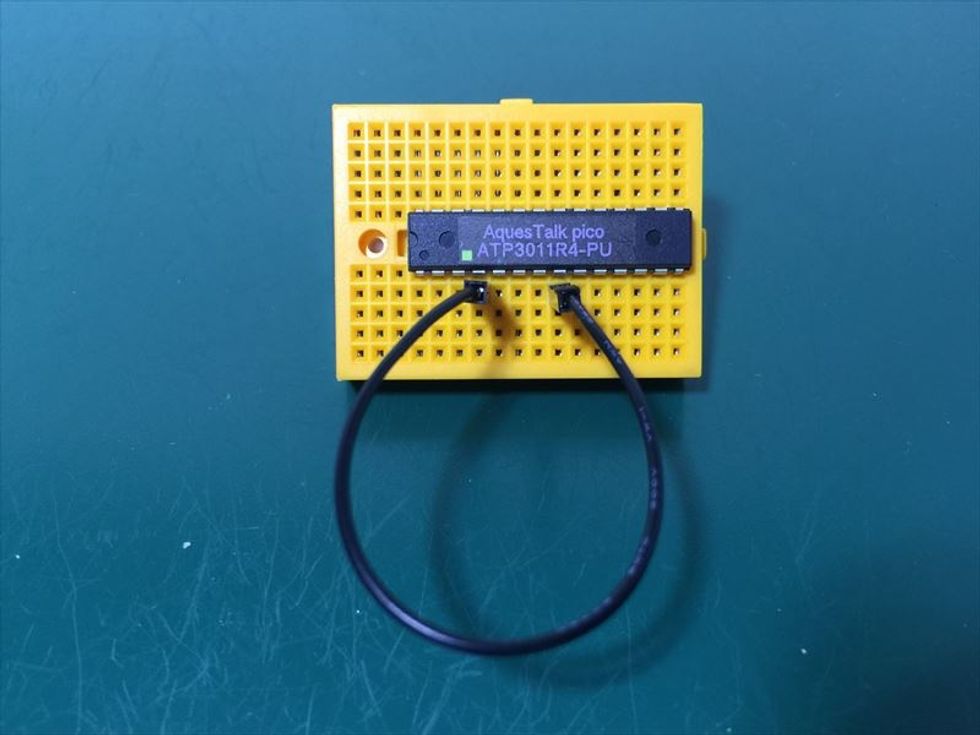
黒いケーブルでSMOD0(下段の左から4番目)とGND(下段の右から7番目)をつなぎます。こうすることで通信モードが「I2C方式」になります。
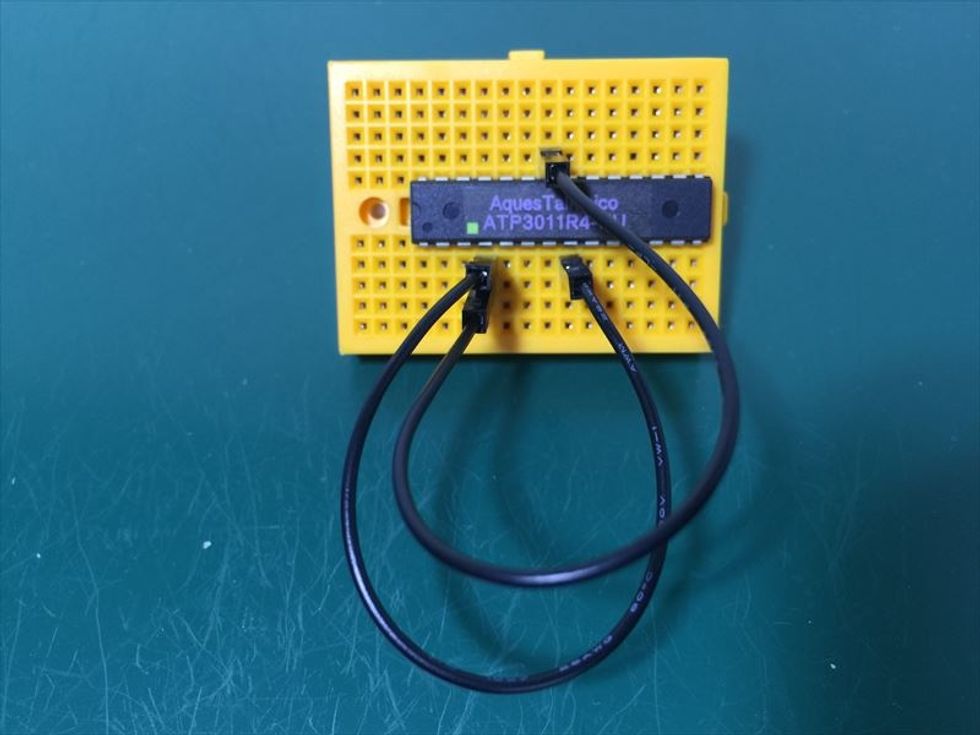
さらに黒いケーブルでSMOD0とGND(上段左から7番目)をつなぎます。
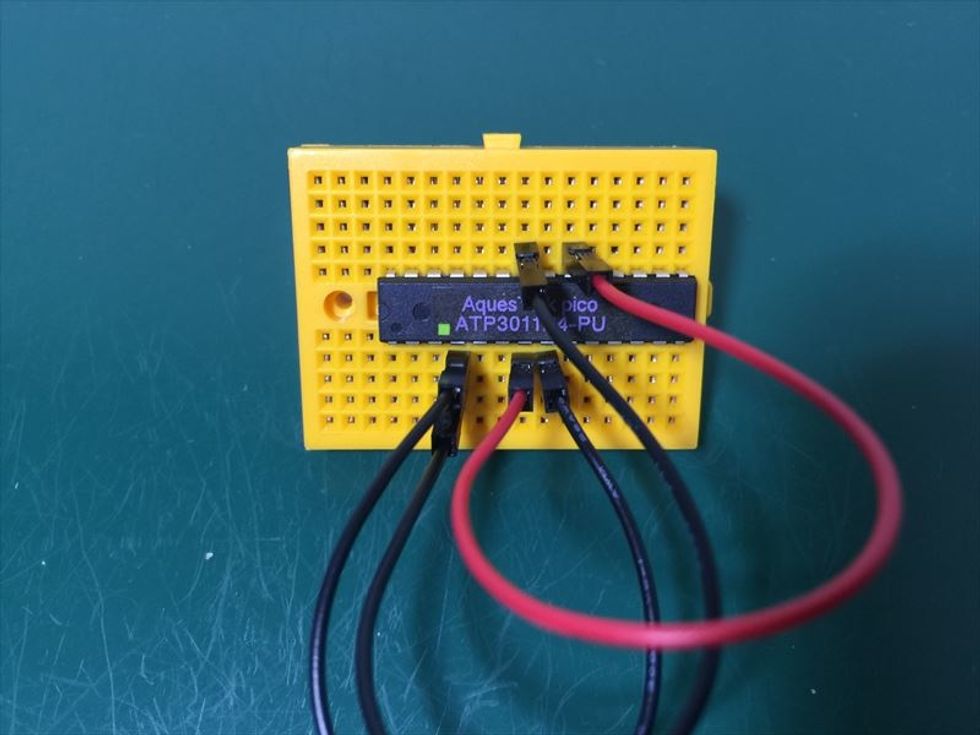
赤いケーブルで2つのVCC「下段の左から7番目」と「上段の右から6番目」をつなぎます。
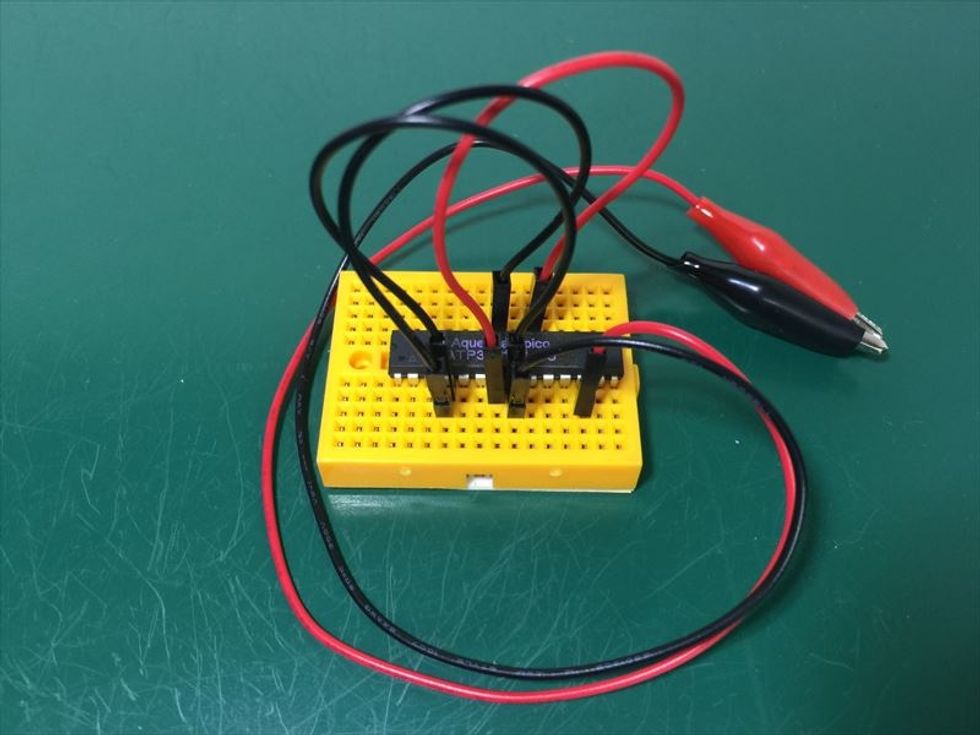
ワニ口クリップの黒をGND(下段の右から7番目」、赤をAOUT(下段の右から3番目)につなぎます。ここから音がでます。
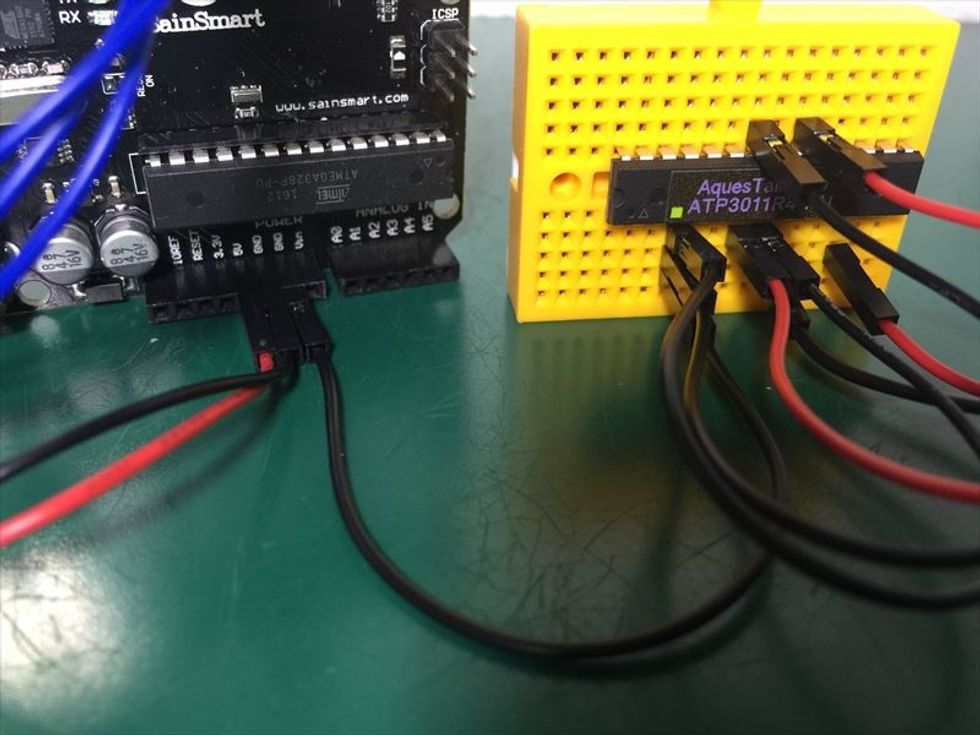
SainSmart UNOとAquesTalk Pico LSIをつなぎます。まずUNOのGNDとAquesTalkのGND(たとえば下段の左から4番目)をつなぎます。
次にUNOの「3.3V」とAquesTalkのVCC(例えば下段の左から7番目)をつなぎます。
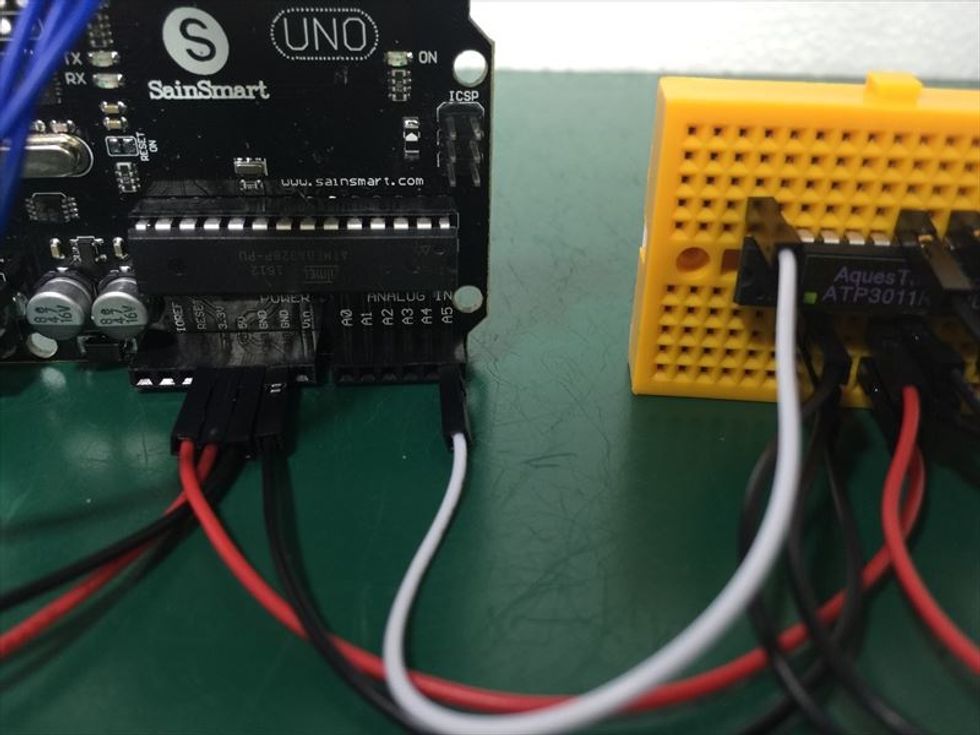
次にI2C通信するためのケーブルをつなぎます。I2CはSCL(クロック)とSDA(データ)の2本のケーブルで通信する方式です。まずUNOのA5とAquesTalkのSCL(上段左端)をつなぎます。
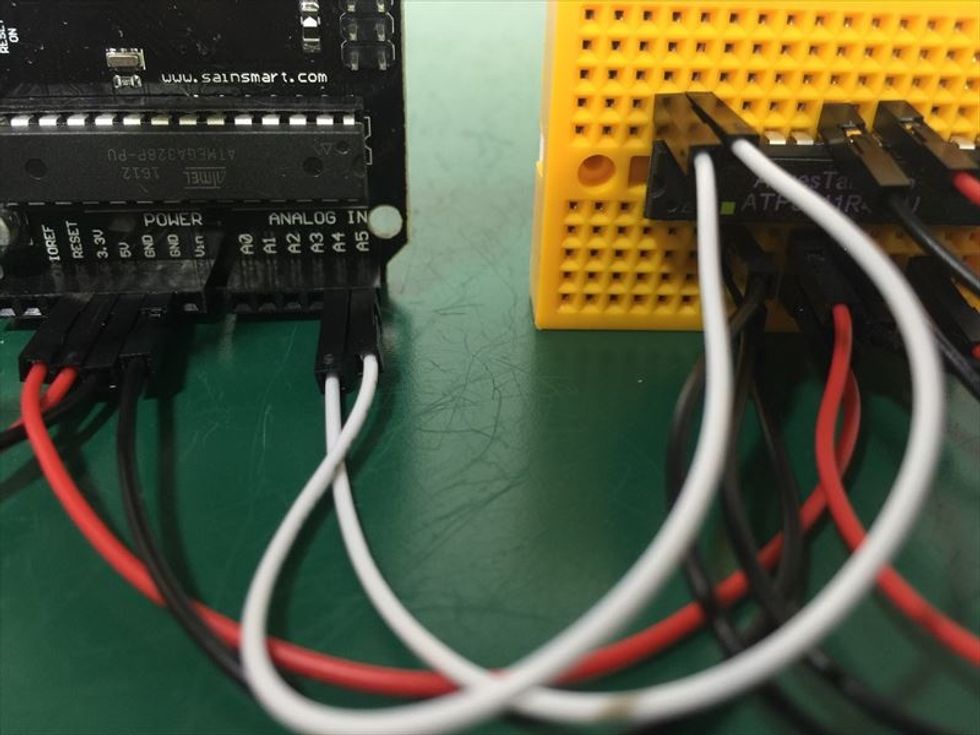
続いてUNOのA4とAquesTalkのSDAをつなぎます。
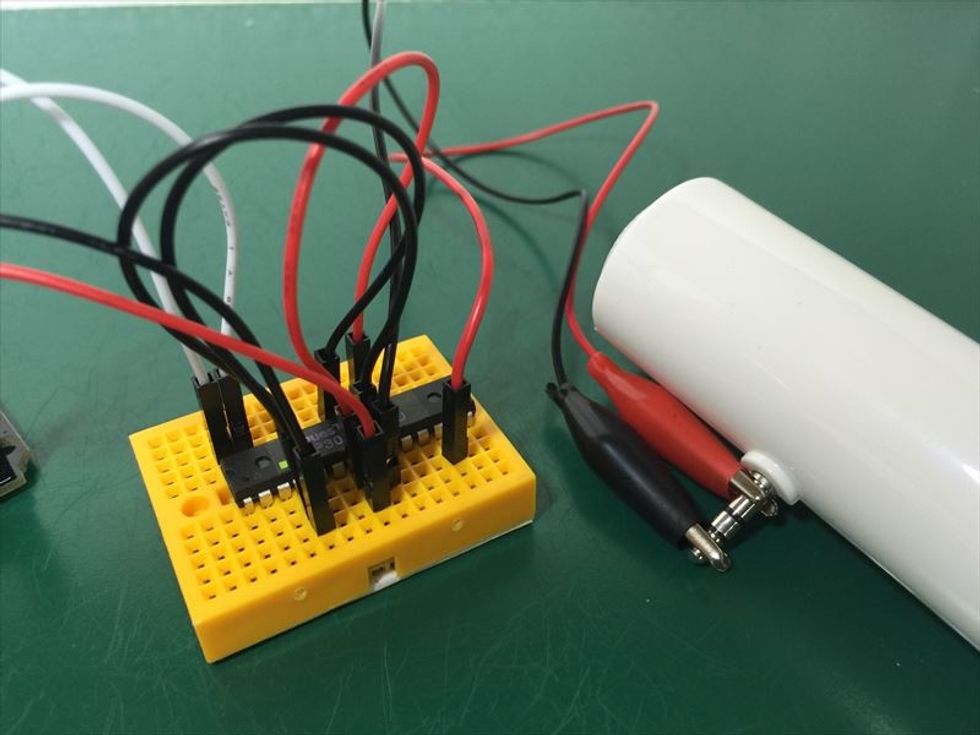
スピーカーにつなぎます。赤いワニ口クリップをステレオミニジャックの根本に、黒いワニ口クリップをミニジャックの先につなぎます。
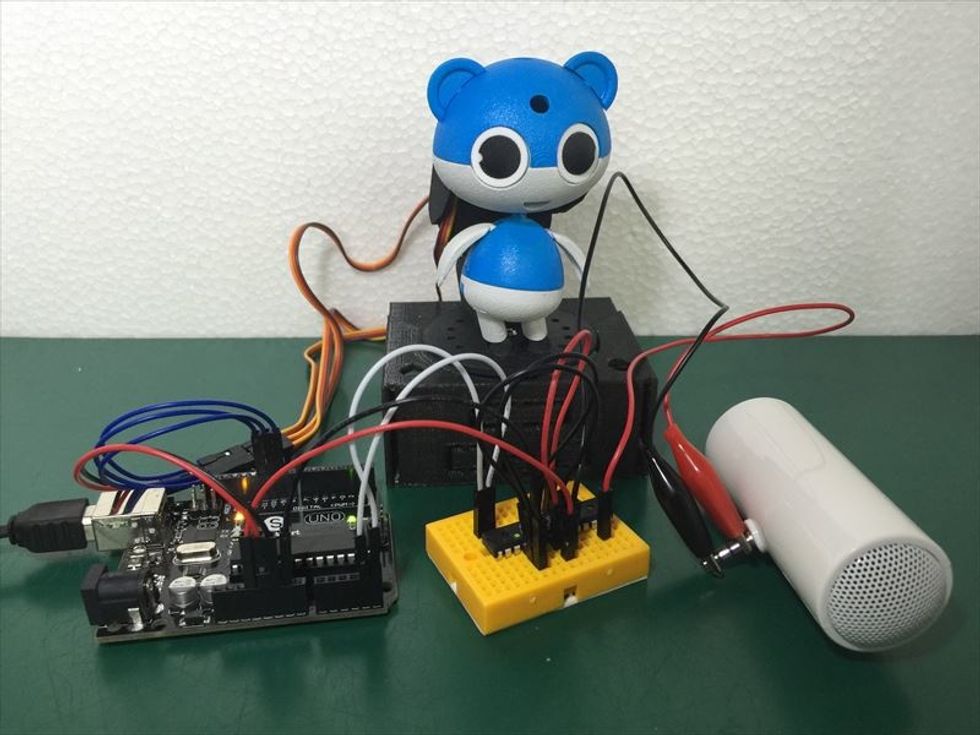
完成しました。UNOに電源ケーブルを刺せば、ベゼリーがしゃべりながら動くはずです。
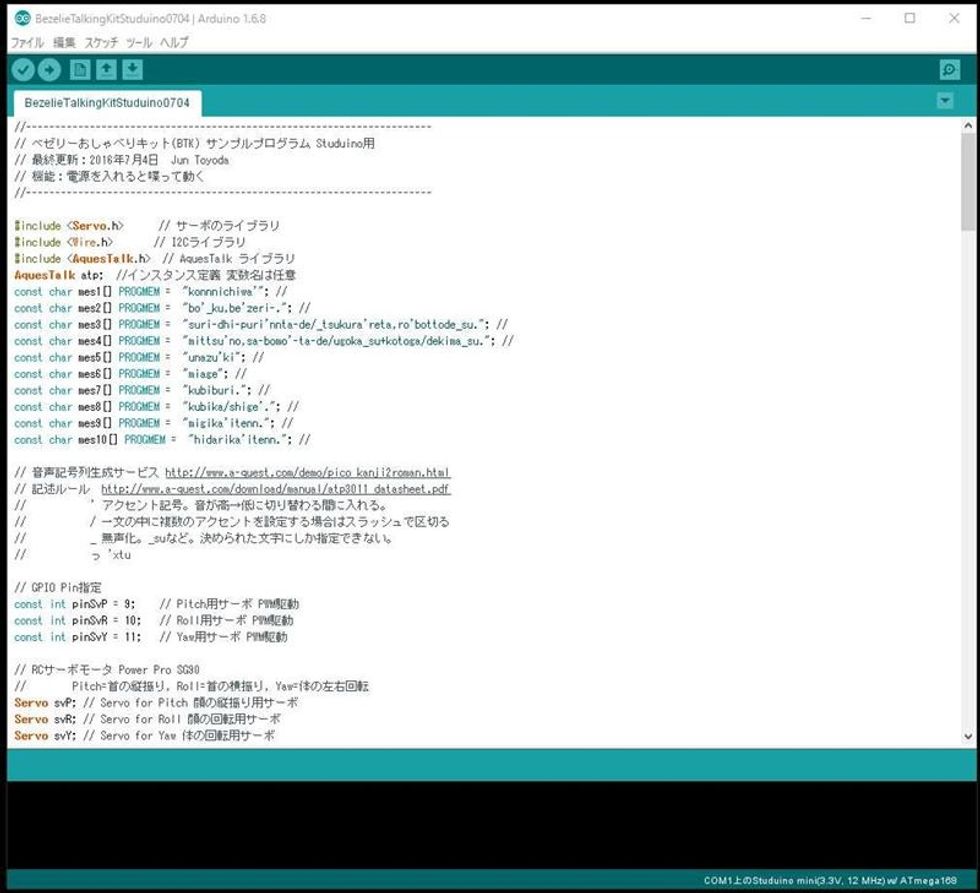
いったん休憩したら、好きな言葉を喋らせてみましょう。サンプルスケッチをベゼリー公式ページからダウンロードし、Arduino IDEで読み込んでください。
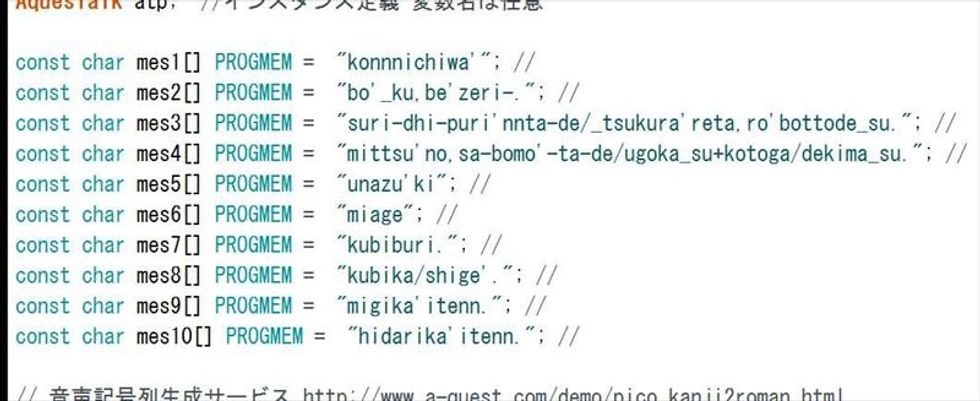
ここがベゼリーに喋らせる言葉を記述している場所です。ダブルクォーテーションで囲まれたところを書き換えることで、ベゼリーのおしゃべりも変わります。でも普通のローマ字とはちょっと違いますね。

㈱アクエストさんが、音声記号を自動的に作ってくれるサービスを提供してくださっています。

上の枠に好きな言葉を入力すると、下の枠におススメの音声記号が表示されますので、ここをコピーしてスケッチに貼り付けましょう。
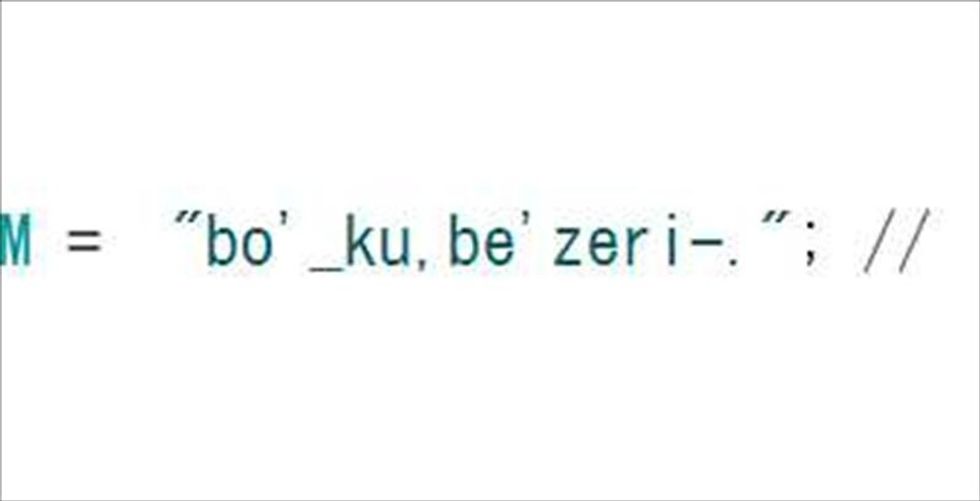
聞いてみて、変だったら記号を自分で修正してみましょう。「'」、「_」、「,」を使いこなすと、だんだん自然な感じに喋らせることができるようになります。
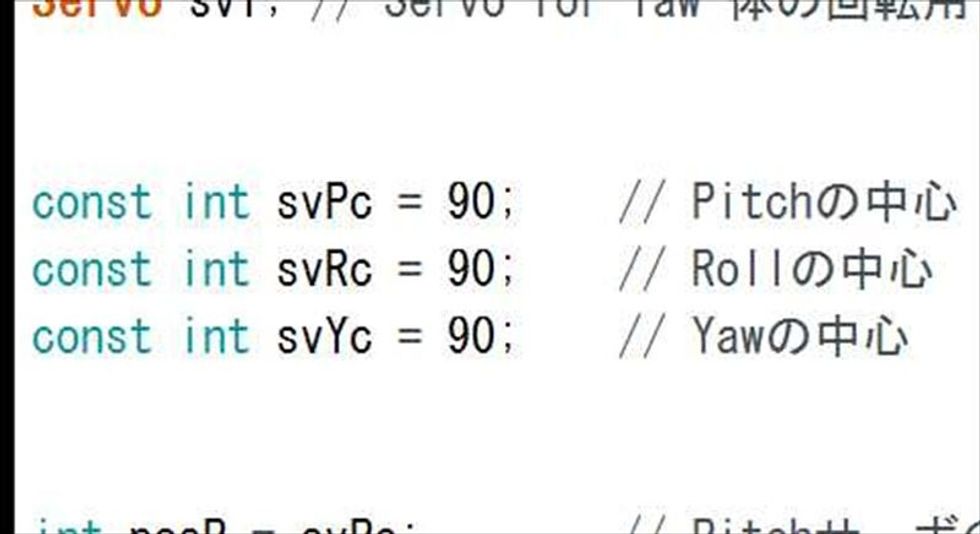
ここで、3つのサーボの基本角度を指定しています。Pは「PAN(首の縦振り)」、Rは「ROLL(首の横振り)」、Yは「YAW(体の回転)」の略です。
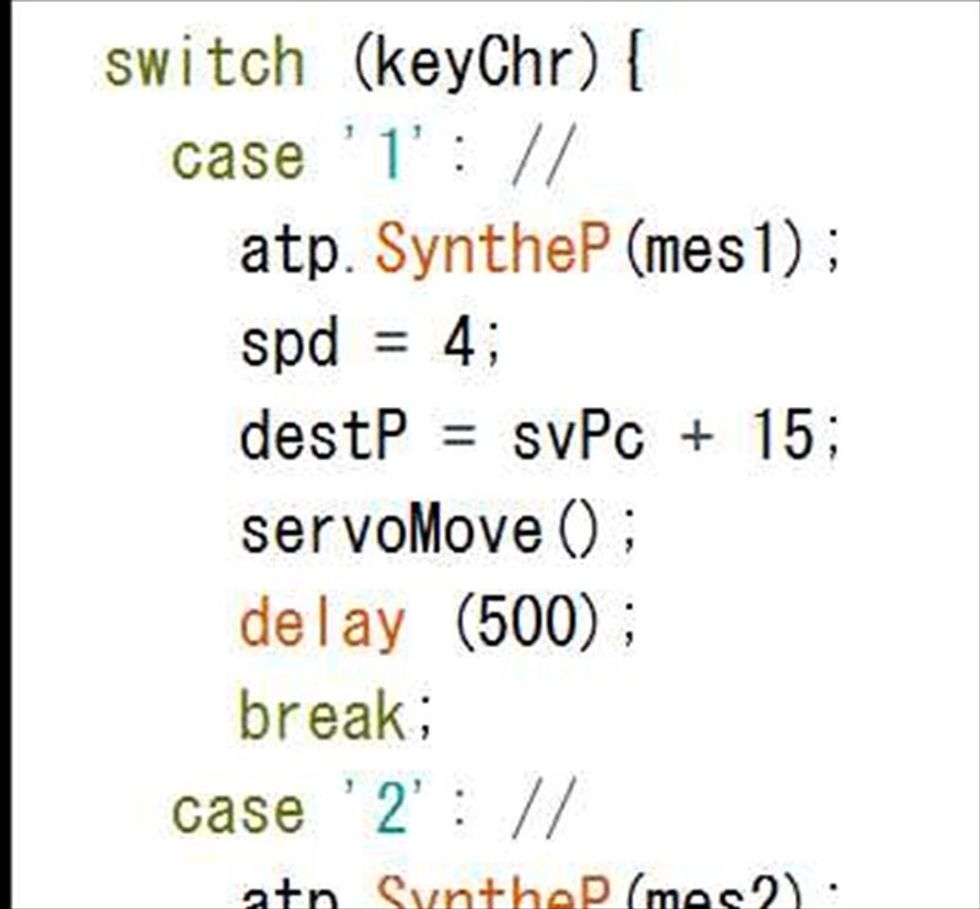
3行目の「atp.SyntheP(mes1);」が、メッセージ1番を再生せよという命令です。その下の2行でサーボの動きを指定し、その下の「servoMove();」で動かしています。
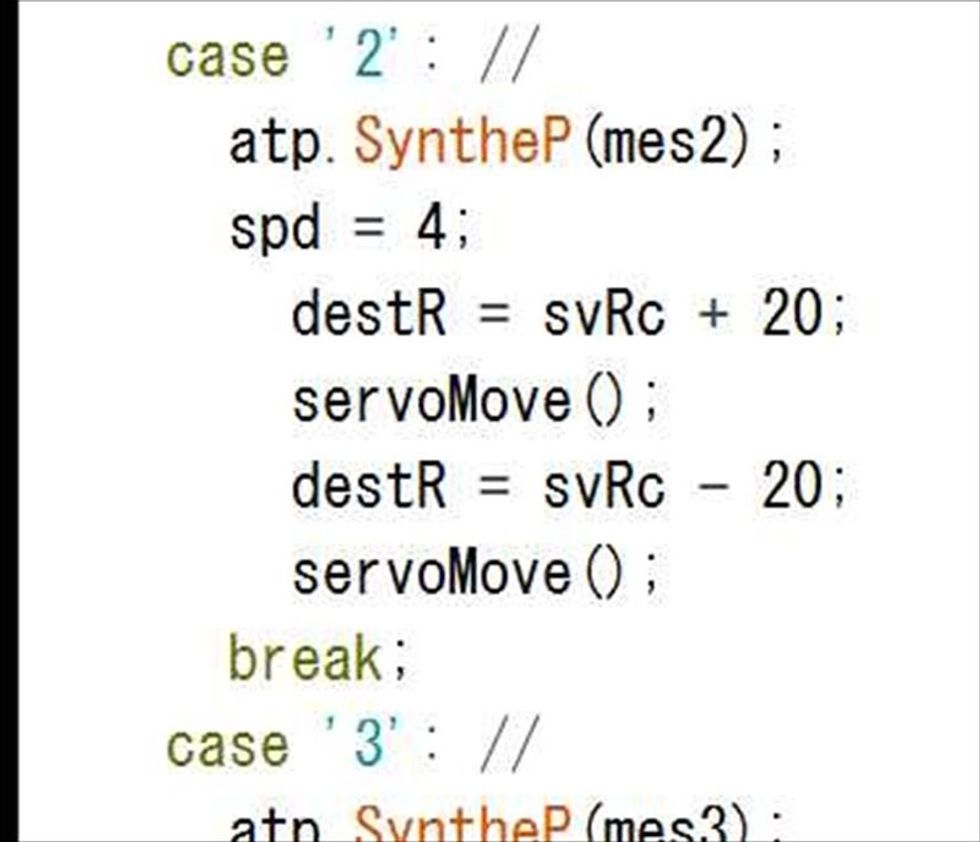
「destR」はR(首の横振り)サーボを回転させる角度を指定しています。「svRc + 20」は基本角度から右に20度の意味です。負の値を入れると左に回転します。
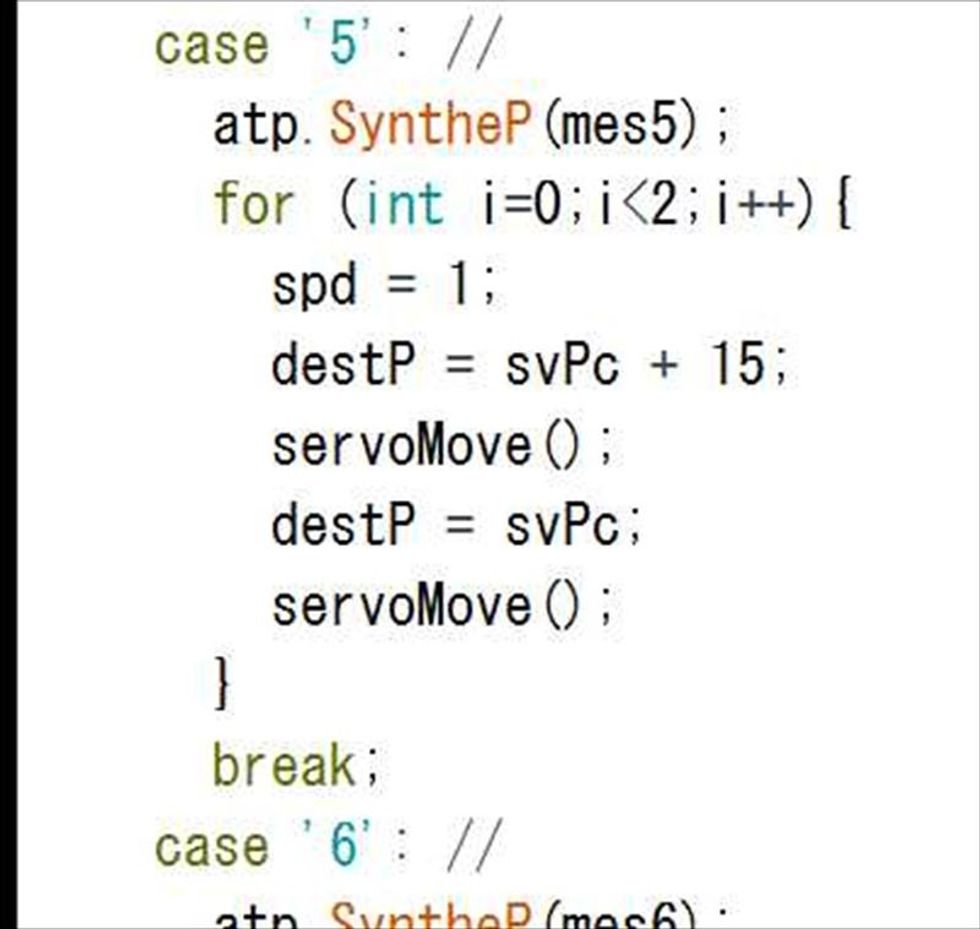
for文を使うなどすることで、同じ動作を繰り返させることもできます。
以上です。spdとDelayの数値を調整して、おしゃべりの長さと体の動きがいっちするよう頑張ってみてください。